一种对插式工业机器人控制模块的制作方法
本技术涉及工业机器人,具体为一种对插式工业机器人控制模块。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
2、现有的工业机器人控制模块根据功能性不同,一般会设置多个模块组件,安装时,集成在控制器电路板上,当需要维修其中某个功能模块时,需要将整个控制器电路板从控制器壳体中拆除,频繁拆卸会造成连接点磨损,且在维修时,也容易造成控制器电路板上的线路损坏,为此我们提出有一种对插式工业机器人控制模块。
技术实现思路
1、本实用新型的目的在于提供一种对插式工业机器人控制模块,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种对插式工业机器人控制模块,包括
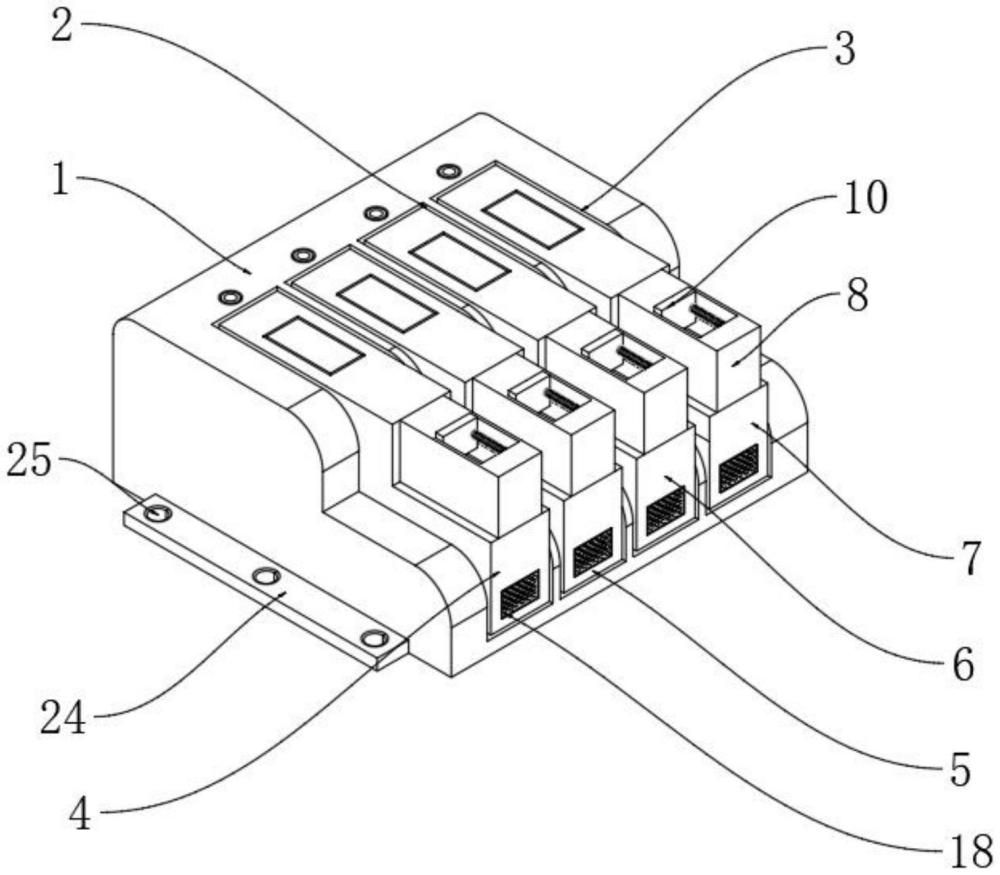
4、控制器本体,控制器本体的一侧固定连接有三个分隔板,三个分隔板将控制器本体的一侧等距离分割为四个插槽,四个插槽从左往右依次插接有运动模块、传感器模块、通信模块和编程模块;
5、运动模块、传感器模块、通信模块和编程模块远离插槽的一侧顶端均固定安装有固定块,固定块的顶端开设有让位槽,让位槽的内部活动安装有活动块,控制器本体位于四个插槽的内侧顶端均开设有卡槽,活动块靠近卡槽的一侧固定连接有固定杆,固定杆的端头固定连接有压头,运动模块、传感器模块、通信模块和编程模块靠近卡槽的一侧均固定连接有两个弹性卡头;
6、运动模块、传感器模块、通信模块和编程模块靠近插槽的一侧均固定连接有连接端,四个插槽靠近连接端的一侧开设有连接槽。
7、优选的,控制器本体靠近连接槽的一侧底端外部连接有输出端,运动模块、传感器模块、通信模块和编程模块远离插槽的一侧底端外部设置有输入端;
8、优选的,让位槽的底端穿透开设有滑槽,活动块的底端固定连接有滑块,滑块与滑槽滑动连接;
9、优选的,让位槽的顶端两侧均固定安装有导向杆,活动块的两端活动连接导向杆,活动块远离固定杆的一侧与让位槽之间设置有弹簧,弹簧与固定杆活动连接;
10、优选的,运动模块、传感器模块、通信模块和编程模块的两侧外壁处均固定连接有若干滑条,四个插槽的两侧均开设有与滑条相对应的条形槽;
11、优选的,控制器本体的两侧底端外壁处均固定连接有安装条,两个安装条的中部均穿透开设有若干安装孔。
12、与现有技术相比,本实用新型的有益效果是:
13、1.该一种对插式工业机器人控制模块,通过控制器本体、分隔板、插槽、运动模块、传感器模块、通信模块和编程模块之间配合使用,在使用时,将对应的模块插接在对应位置的插槽中,插接时,模块一端的连接端与插槽一侧的连接槽插接,然后将输出端和输入端与工业机器人连接即可,当机器人对应的功能故障时,也无需将控制器整体拆卸,可以根据故障原因将对应的模块单独取下维修或者更换。
14、2.该一种对插式工业机器人控制模块,通过活动块、固定杆、压头、弹性卡头和卡槽之间配合使用,拆卸时,将活动块往回拉动,活动块带动固定杆同步回拉,这时压头从两个弹性卡头之间退出,压头退出后,两个弹性卡头复位回弹,然后将对应的模块从插槽从拉出,拉出时弹性卡头从卡槽同步退出,从而达到便于快速拆卸的目的。
技术特征:
1.一种对插式工业机器人控制模块,其特征在于:包括
2.根据权利要求1所述的一种对插式工业机器人控制模块,其特征在于:控制器本体(1)靠近连接槽(16)的一侧底端外部连接有输出端(17),运动模块(4)、传感器模块(5)、通信模块(6)和编程模块(7)远离插槽(3)的一侧底端外部设置有输入端(18)。
3.根据权利要求1所述的一种对插式工业机器人控制模块,其特征在于:让位槽(9)的底端穿透开设有滑槽(19),活动块(10)的底端固定连接有滑块(20),滑块(20)与滑槽(19)滑动连接。
4.根据权利要求1所述的一种对插式工业机器人控制模块,其特征在于:让位槽(9)的顶端两侧均固定安装有导向杆(21),活动块(10)的两端活动连接导向杆(21),活动块(10)远离固定杆(12)的一侧与让位槽(9)之间设置有弹簧(22),弹簧(22)与固定杆(12)活动连接。
5.根据权利要求1所述的一种对插式工业机器人控制模块,其特征在于:运动模块(4)、传感器模块(5)、通信模块(6)和编程模块(7)的两侧外壁处均固定连接有若干滑条(23),四个插槽(3)的两侧均开设有与滑条(23)相对应的条形槽。
6.根据权利要求1所述的一种对插式工业机器人控制模块,其特征在于:控制器本体(1)的两侧底端外壁处均固定连接有安装条(24),两个安装条(24)的中部均穿透开设有若干安装孔(25)。
技术总结
本技术涉及工业机器人技术领域,具体为一种对插式工业机器人控制模块,包括控制器本体,控制器本体的一侧固定连接有三个分隔板,三个分隔板将控制器本体的一侧等距离分割为四个插槽,四个插槽从左往右依次插接有运动模块、传感器模块、通信模块和编程模块。本技术通过控制器本体、分隔板、插槽、运动模块、传感器模块、通信模块和编程模块之间配合使用,在使用时,将对应的模块插接在对应位置的插槽中,插接时,模块一端的连接端与插槽一侧的连接槽插接,然后将输出端和输入端与工业机器人连接即可,当机器人对应的功能故障时,也无需将控制器整体拆卸,可以根据故障原因将对应的模块单独取下维修或者更换。
技术研发人员:黄祥才,胡春旭,顾强,彭锦,靳晨辉
受保护的技术使用者:武汉精锋微控科技有限公司
技术研发日:20230626
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!