一种稳定型机器人的制作方法
本技术涉及机器人领域,尤其是涉及一种稳定型机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务。
2、发明人在日常工作中发现在商场或者酒店使用机器人本体为客户进行引导服务时,机器人本体在使用的过程中当有行人或者其他外力不小心将其碰撞到时,可能会导致机器人本体发生倾斜倒塌,倒塌时发生撞击可能会导致机器人本体发生损坏,影响机器人本体的使用。
3、为了解决机器人本体在使用的过程中当有行人或者其他外力不小心将其碰撞到时,可能会导致机器人本体发生倾斜倒塌,倒塌时发生撞击可能会导致机器人本体发生损坏,影响机器人本体的使用的问题,现有技术是采用机器人本体倾倒后通过控制系统使喇叭发出求救的声音,叫来工作人员将其扶起的方式进行处理,本申请提供了另一种解决方式。
技术实现思路
1、本实用新型为解决机器人本体在使用的过程中当有行人或者其他外力不小心将其碰撞到时,可能会导致机器人本体发生倾斜倒塌,倒塌时发生撞击可能会导致机器人本体发生损坏,影响机器人本体的使用的问题,现有技术是采用机器人本体倾倒后通过控制系统使喇叭发出求救的声音,叫来工作人员将其扶起的方式进行处理,本申请提供了另一种解决方式所提出一种稳定型机器人。
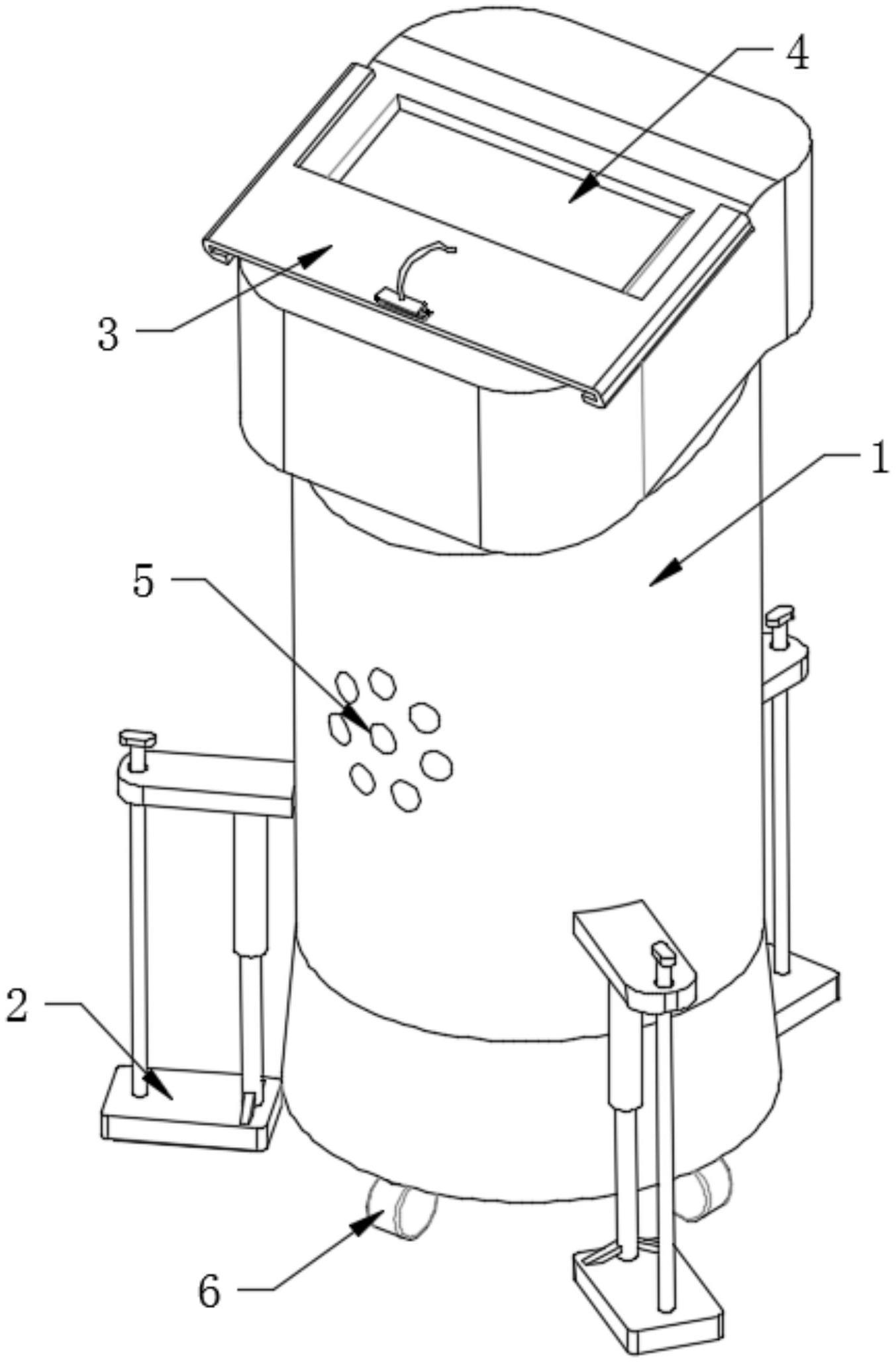
2、为了实现上述目的,本实用新型采用了如下技术方案:一种稳定型机器人,包括机器人本体,所述机器人本体的顶部设置有显示屏,所述机器人本体的外表面设置有喇叭,所述机器人本体的底部固定连接有若干个万向轮,所述机器人本体的外表面设置有若干个支撑装置,所述机器人本体的一侧设置有防护装置,所述支撑装置包括支架,所述支架的一侧固定连接有电动伸缩杆,所述电动伸缩杆的输出端固定连接有支撑块。
3、上述部件所达到的效果为:通过设置支撑装置,在商场或者酒店使用机器人本体为客户进行引导服务时,机器人本体在使用时将其停放在一定的位置后,可以启动支架上的电动伸缩杆使其向下运动,带动支撑块支撑在地面上,从而可以将机器人本体的外表面支撑限位住,使其在使用过程中,当有行人或者其他外力不小心将其碰撞到时,机器人本体不易发生倾斜倒塌,从而不会影响机器人本体的使用,在使用机器人本体时,通过对显示屏的操作进行指令输入,然后通过机器人本体进行控制分析后再由喇叭发出相对应的声音或者启动万向轮行驶等操作。
4、优选的,所述支撑块的底部固定连接有第一防滑块,所述第一防滑块的底部固定连接有若干个防滑凸起。
5、上述部件所达到的效果为:通过设置第一防滑块,可以增大支撑块底部的接触摩擦力,使其支撑在地面上时不易发生滑动。
6、优选的,所述电动伸缩杆的输出端外表面对称固定连接有加固杆,所述加固杆的一端与支撑块的一侧固定连接。
7、上述部件所达到的效果为:通过设置加固杆,可以增大电动伸缩杆输出端与支撑块一侧的接触面积,使其连接得更加牢固。
8、优选的,所述支撑块的顶部固定连接有限位杆,所述支架的一侧开设有限位孔,所述限位孔的内壁与限位杆的外表面滑动连接。
9、上述部件所达到的效果为:通过设置限位杆和限位孔,可以将支撑块的一侧远离电动伸缩杆的一端固定限位在支架的一侧上,使其支撑块在上下来回运动时,远离电动伸缩杆的一端不易发生晃动。
10、优选的,所述防护装置包括防护盖和卡块,所述机器人本体的两侧均开设有滑槽,两个所述滑槽的内壁大小和形状与防护盖的两端外表面大小和形状相适配,所述防护盖的一侧开设有卡孔,所述机器人本体的一侧开设有卡槽,所述卡孔和卡槽的内壁大小和形状均与卡块的一端外表面大小和形状相适配。
11、上述部件所达到的效果为:通过设置防护装置,在对机器人本体进行搬运运输时,可以手动将防护盖的两端卡进两个滑槽中至相应位置后,然后再将卡块从卡孔中卡入,使其卡进卡槽中,从而可以使防护盖将显示屏防护罩住后固定限位在机器人本体的一侧上,使其在搬运时发生碰撞不易将显示屏碰撞到,导致显示屏发生损坏。
12、优选的,所述卡块的一端外表面固定连接有第二防滑块,所述卡孔和卡槽的内壁大小和形状均与第二防滑块的外表面大小和形状相适配。
13、上述部件所达到的效果为:通过设置第二防滑块,可以增大卡块一端表面的摩擦力,使其卡进卡孔和卡槽中后不易发生晃动。
14、优选的,所述卡块的一端固定连接有连接绳,所述连接绳的一端与防护盖的一侧固定连接。
15、上述部件所达到的效果为:通过设置连接绳,可以将卡块的一侧固定限位在防护盖的一侧上,使其从卡孔和卡槽中拔出后不易发生丢失。
16、综上所述,本实用新型的有益效果为:
17、在商场或者酒店使用机器人本体为客户进行引导服务时,机器人本体在使用时将其停放在一定的位置后,可以启动支架上的电动伸缩杆使其向下运动,带动支撑块支撑在地面上,从而可以将机器人本体的外表面支撑限位住,使其在使用过程中,当有行人或者其他外力不小心将其碰撞到时,机器人本体不易发生倾斜倒塌,从而不会影响机器人本体的使用,在使用机器人本体时,通过对显示屏的操作进行指令输入,然后通过机器人本体进行控制分析后再由喇叭发出相对应的声音或者启动万向轮行驶等操作。
技术特征:
1.一种稳定型机器人,包括机器人本体(1),其特征在于:所述机器人本体(1)的顶部设置有显示屏(4),所述机器人本体(1)的外表面设置有喇叭(5),所述机器人本体(1)的底部固定连接有若干个万向轮(6),所述机器人本体(1)的外表面设置有若干个支撑装置(2),所述机器人本体(1)的一侧设置有防护装置(3),所述支撑装置(2)包括支架(21),所述支架(21)的一侧固定连接有电动伸缩杆(22),所述电动伸缩杆(22)的输出端固定连接有支撑块(23)。
2.根据权利要求1所述的一种稳定型机器人,其特征在于:所述支撑块(23)的底部固定连接有第一防滑块(24),所述第一防滑块(24)的底部固定连接有若干个防滑凸起。
3.根据权利要求1所述的一种稳定型机器人,其特征在于:所述电动伸缩杆(22)的输出端外表面对称固定连接有加固杆(25),所述加固杆(25)的一端与支撑块(23)的一侧固定连接。
4.根据权利要求1所述的一种稳定型机器人,其特征在于:所述支撑块(23)的顶部固定连接有限位杆(26),所述支架(21)的一侧开设有限位孔(27),所述限位孔(27)的内壁与限位杆(26)的外表面滑动连接。
5.根据权利要求1所述的一种稳定型机器人,其特征在于:所述防护装置(3)包括防护盖(32)和卡块(35),所述机器人本体(1)的两侧均开设有滑槽(31),两个所述滑槽(31)的内壁大小和形状与防护盖(32)的两端外表面大小和形状相适配,所述防护盖(32)的一侧开设有卡孔(33),所述机器人本体(1)的一侧开设有卡槽(34),所述卡孔(33)和卡槽(34)的内壁大小和形状均与卡块(35)的一端外表面大小和形状相适配。
6.根据权利要求5所述的一种稳定型机器人,其特征在于:所述卡块(35)的一端外表面固定连接有第二防滑块(36),所述卡孔(33)和卡槽(34)的内壁大小和形状均与第二防滑块(36)的外表面大小和形状相适配。
7.根据权利要求5所述的一种稳定型机器人,其特征在于:所述卡块(35)的一端固定连接有连接绳(37),所述连接绳(37)的一端与防护盖(32)的一侧固定连接。
技术总结
本技术公开了一种稳定型机器人,具体涉及机器人领域,本技术包括机器人本体,所述机器人本体的顶部设置有显示屏,本技术在商场或者酒店使用机器人本体为客户进行引导服务时,机器人本体在使用时将其停放在一定的位置后,可以启动支架上的电动伸缩杆使其向下运动,带动支撑块支撑在地面上,从而可以将机器人本体的外表面支撑限位住,使其在使用过程中,当有行人或者其他外力不小心将其碰撞到时,机器人本体不易发生倾斜倒塌,从而不会影响机器人本体的使用,在使用机器人本体时,通过对显示屏的操作进行指令输入,然后通过机器人本体进行控制分析后再由喇叭发出相对应的声音或者启动万向轮行驶等操作。
技术研发人员:管星海,张志斌
受保护的技术使用者:淼可森光伏电站运维管理南京有限公司
技术研发日:20230627
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!