一种可调式重载桁架机器人用伺服抓手的制作方法
本技术涉及机械夹具,具体涉及一种可调式重载桁架机器人用伺服抓手。
背景技术:
1、重载桁架机器人也叫做直角坐标机器人和龙门式机器人,工业应用中,能够实现自动控制的、可重复编程的、多功能的、多自由度的、运动自由度间成空间直角关系、多用途的操作机,其能够搬运物体、操作工具,以完成各种作业,广泛地运用在机械制造、冶金、电子、轻工和原子能等生产车间用以抓取移转物件,但是现有的机器人抓手具有一定的局限性,不易抓取直径变化范围较大的物件,夹爪不易调节。
技术实现思路
1、解决的技术问题:现有的伺服抓手局限性较大,夹爪不便调节,且抓取方式较为单一。
2、针对现有技术的不足,本实用新型提供了一种可调式重载桁架机器人用伺服抓手,解决了背景技术中提到的问题。
3、技术方案:
4、为实现以上目的,本实用新型通过以下技术方案予以实现:
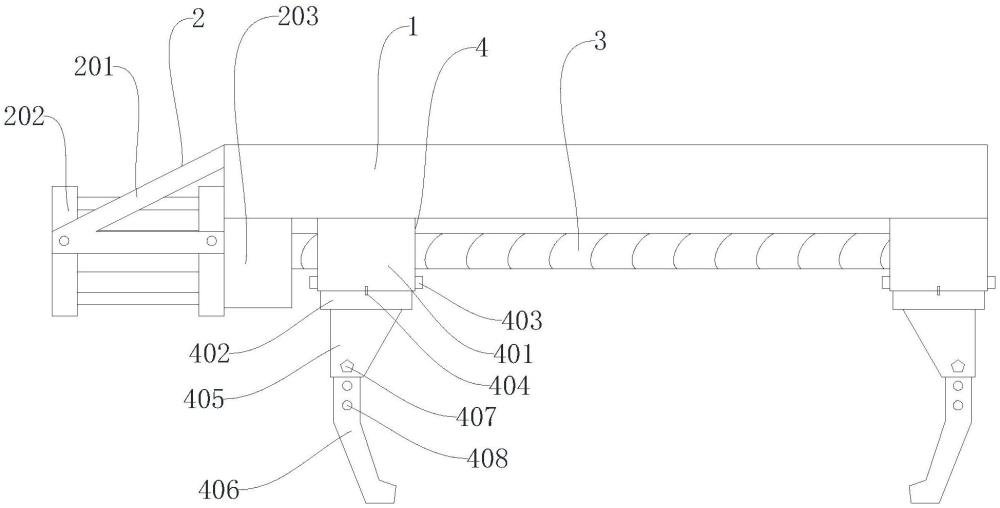
5、一种可调式重载桁架机器人用伺服抓手,包括:安装架,所述安装架一侧设置有传动机构,所述安装架下端设置有传动辊,所述传动辊表面贯穿设置有夹持机构。
6、在一种可能的实现方式中,所述传动机构包括三角架、电机以及限位块,所述三角架固定安装在电机两侧且一端与安装架固定连接,所述限位块与顶部与安装架固定连接。
7、在一种可能的实现方式中,所述传动辊贯穿至限位块内部且与电机固定安装,所述传动辊与限位块之间存在有转动连接。
8、在一种可能的实现方式中,所述传动辊表面贯穿设置有两组夹持机构,两组所述夹持机构分别设置在传动辊的中段以及末端,所述传动辊末端的夹持机构固定安装在安装架底部且一侧与传动辊转动连接。
9、在一种可能的实现方式中,所述夹持机构包括基转换柱、次转换柱、固位键、定位槽、主夹爪、次夹爪、插键以及插槽,所述次转换柱滑动安装在基转换柱底部,所述固位键贯穿设置在基转换柱以及次转换柱之间。
10、在一种可能的实现方式中,所述基转换柱以及次转换柱表面均开设有定位槽,所述定位槽与固位键安装位置相对应。
11、在一种可能的实现方式中,所述次夹爪滑动安装在主夹爪底部,所述主夹爪与次夹爪之间贯穿设置有插键,所述次夹爪表面贯穿开设有若干插槽。
12、有益效果:
13、一是,通过启动一侧电机,使电机带动传动辊转动,进而带动传动辊表面的夹持机构向另一侧收缩,对物体进行夹取;
14、二是,通过反转安装基转换柱底部的次转换柱,可以改变夹爪的方向,再通过电机带动传动辊,可以使夹爪向外收缩,以便对环形的物体进行夹取,通过将次夹爪进一步安装进主夹爪,再由插键进行固定,可以改变夹取深度,以便对不同体积的物体进行夹取。
技术特征:
1.一种可调式重载桁架机器人用伺服抓手,包括:安装架(1),其特征在于:所述安装架(1)一侧设置有传动机构(2),所述安装架(1)下端设置有传动辊(3),所述传动辊(3)表面贯穿设置有夹持机构(4)。
2.根据权利要求1所述的一种可调式重载桁架机器人用伺服抓手,其特征在于:所述传动机构(2)包括三角架(201)、电机(202)以及限位块(203),所述三角架(201)固定安装在电机(202)两侧且一端与安装架(1)固定连接,所述限位块(203)与顶部与安装架(1)固定连接。
3.根据权利要求1所述的一种可调式重载桁架机器人用伺服抓手,其特征在于:所述传动辊(3)贯穿至限位块(203)内部且与电机(202)固定安装,所述传动辊(3)与限位块(203)之间存在有转动连接。
4.根据权利要求1所述的一种可调式重载桁架机器人用伺服抓手,其特征在于:所述传动辊(3)表面贯穿设置有两组夹持机构(4),两组所述夹持机构(4)分别设置在传动辊(3)的中段以及末端,所述传动辊(3)末端的夹持机构(4)固定安装在安装架(1)底部且一侧与传动辊(3)转动连接。
5.根据权利要求1所述的一种可调式重载桁架机器人用伺服抓手,其特征在于:所述夹持机构(4)包括基转换柱(401)、次转换柱(402)、固位键(403)、定位槽(404)、主夹爪(405)、次夹爪(406)、插键(407)以及插槽(408),所述次转换柱(402)滑动安装在基转换柱(401)底部,所述固位键(403)贯穿设置在基转换柱(401)以及次转换柱(402)之间。
6.根据权利要求5所述的一种可调式重载桁架机器人用伺服抓手,其特征在于:所述基转换柱(401)以及次转换柱(402)表面均开设有定位槽(404),所述定位槽(404)与固位键(403)安装位置相对应。
7.根据权利要求6所述的一种可调式重载桁架机器人用伺服抓手,其特征在于:所述次夹爪(406)滑动安装在主夹爪(405)底部,所述主夹爪(405)与次夹爪(406)之间贯穿设置有插键(407),所述次夹爪(406)表面贯穿开设有若干插槽(408)。
技术总结
本技术公开了一种可调式重载桁架机器人用伺服抓手,具体涉及机械夹具技术领域,包括:安装架,所述安装架一侧设置有传动机构,所述安装架下端设置有传动辊,所述传动辊表面贯穿设置有夹持机构。
技术研发人员:王强,杨勇,石双山,钱凤来,白晨鹤,王丹红,陈佳男,张伟,张楠,谢琳
受保护的技术使用者:云科智能制造(沈阳)有限公司
技术研发日:20230626
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!