一种夹持机械手的制作方法
本技术涉及一种夹持机械手。
背景技术:
1、目前,在自助售药机上大多数的取药装置是通过机械手臂抓取药盒,但是机械手臂结构复杂,在抓取药盒过程中,机械手臂多采用气缸直接驱动,机械手臂的运动精度控制较难,会存在偏移风险,取药精准率不够。而且机械手臂一般至单独具有吸盘或者单独采用夹持手指,取药方式单一。
技术实现思路
1、本实用新型的目的是克服现有技术的缺陷,提供一种夹持机械手,同时具有吸盘和夹持手指,取药方式多样,通过齿轮旋转带动齿条精确运动,实现精准取药动作。
2、实现上述目的的技术方案是:一种夹持机械手,包括底框、滑台机构、夹指机构和吸盘机构,其中:
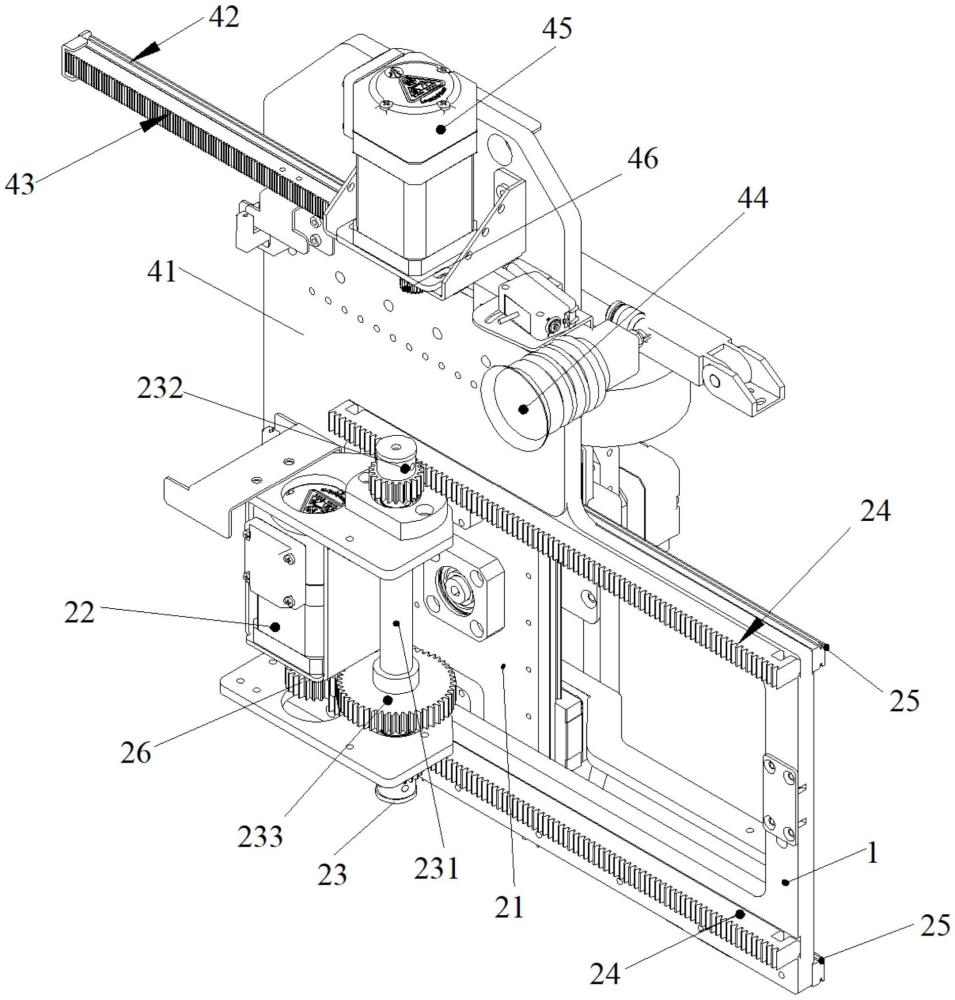
3、所述滑台机构包括滑台、滑台驱动电机、齿轮连杆机构和两个齿条,所述两个齿条一左一右地纵向设置在所述底框的下端,所述滑台可前后移动地设置在所述底框的上端;所述滑台驱动电机设置在所述滑台的下表面,所述滑台驱动电机的输出端设置有主动齿轮;所述齿轮连杆机构包括横杆、两个端齿轮和从动齿轮,所述横杆通过支架设置在所述滑台的下表面,所述两个端齿轮分设在所述横杆的两端,且所述两个端齿轮一一对应地与所述两个齿条相咬合,所述从动齿轮设置在所述横杆的中部,且所述从动齿轮与所述主动齿轮相啮合;
4、所述夹指机构包括夹指驱动电机、两个夹指齿条和两个夹持手指,所述夹指驱动电机设置在所述滑台的上表面,每个夹指齿条可左右移动地设置在所述滑台上,且所述两个夹指齿条分设在所述夹指驱动电机的前、后侧,所述夹指驱动电机的输出端设置有夹指齿轮,所述夹指齿轮分别与所述两个夹指齿条相咬合;所述两个夹持手指一左一右地相对设置,且所述两个夹持手指的后端一一对应地与所述两个夹指齿条相连;
5、所述吸盘机构包括底板、滑块导轨、吸盘齿条、吸盘和吸盘驱动电机,所述底板连接在所述底框的一侧,所述滑块导轨纵向设置在所述底板的下表面,所述吸盘齿条可前后移动地设置在所述滑块导轨上,所述吸盘设置在所述吸盘齿条的前端;所述吸盘驱动电机设置在所述底板上,且所述吸盘驱动电机的输出端设置有吸盘齿轮,所述吸盘齿轮与所述吸盘齿条咬合。
6、上述的一种夹持机械手,其中,所述底框的上端一左一右地设置有两条滑台导轨,所述滑台的左、右端可前后移动地设置在所述两条滑台导轨上。
7、上述的一种夹持机械手,其中,所述滑台的上表面一前一后地相对设置有两个夹指导轨,所述两个夹指齿条一一对应地设置在所述两个夹指导轨的相对面上,且每个夹指齿条沿相应的夹指导轨左右移动。
8、上述的一种夹持机械手,其中,所述吸盘通过气管连接真空泵。
9、上述的一种夹持机械手,其中,所述底板上设置有拖链。
10、上述的一种夹持机械手,其中,所述滑台驱动电机、夹指驱动电机和吸盘驱动电机分别采用步进电机。
11、本实用新型的夹持机械手,同时具有吸盘和夹持手指,取药方式多样,通过齿轮旋转带动齿条精确运动,实现精准取药动作。
技术特征:
1.一种夹持机械手,其特征在于,包括底框、滑台机构、夹指机构和吸盘机构,其中:
2.根据权利要求1所述的一种夹持机械手,其特征在于,所述底框的上端一左一右地设置有两条滑台导轨,所述滑台的左、右端可前后移动地设置在所述两条滑台导轨上。
3.根据权利要求1所述的一种夹持机械手,其特征在于,所述滑台的上表面一前一后地相对设置有两个夹指导轨,所述两个夹指齿条一一对应地设置在所述两个夹指导轨的相对面上,且每个夹指齿条沿相应的夹指导轨左右移动。
4.根据权利要求1所述的一种夹持机械手,其特征在于,所述吸盘通过气管连接真空泵。
5.根据权利要求1所述的一种夹持机械手,其特征在于,所述底板上设置有拖链。
6.根据权利要求1所述的一种夹持机械手,其特征在于,所述滑台驱动电机、夹指驱动电机和吸盘驱动电机分别采用步进电机。
技术总结
本技术公开了一种夹持机械手,包括底框、滑台机构、夹指机构和吸盘机构,滑台机构包括滑台、滑台驱动电机、齿轮连杆机构和两个齿条,夹指机构包括夹指驱动电机、两个夹指齿条和两个夹持手指,吸盘机构包括底板、滑块导轨、吸盘齿条、吸盘和吸盘驱动电机,底板连接在底框的一侧,滑块导轨纵向设置在底板的下表面,吸盘齿条可前后移动地设置在滑块导轨上,吸盘设置在吸盘齿条的前端;吸盘驱动电机设置在所述底板上,且吸盘驱动电机的输出端设置有吸盘齿轮,所述吸盘齿轮与所述吸盘齿条咬合。本技术的夹持机械手,同时具有吸盘和夹持手指,取药方式多样,通过齿轮旋转带动齿条精确运动,实现精准取药动作。
技术研发人员:戴建伟,马威威,李传奇,赵凌,龚卫勇
受保护的技术使用者:韦乐海茨(上海)医药设备科技有限公司
技术研发日:20230629
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!