一种三轴机器人限高装置的制作方法
本申请涉及分拣装置领域,尤其是涉及一种三轴机器人限高装置。
背景技术:
1、由于城市人口不断增长,人们产生的垃圾也越来越多。垃圾通过分类可以进行回收利用,但是如果仅依靠人力去进行垃圾分类,效率有限,所以设计出了垃圾分拣系统,用于解决人工垃圾分类的效率低下的问题。
2、通常,分拣系统的工作原理是:物品通过传送带,经过检测装置检测后,将需要分拣的物品坐标发送给处理器,再对机械臂和机械爪进行控制,将物品抓取起来放到回收箱。但是,机械爪的尺寸有限,对被抓取的物品大小有范围限制,不能抓取比机械爪限定高度更高的物品;同时,机械臂在夹取运动的路径,是计算过的最短路径,如果出现比较高的物品,在高速移动的情况下就可能与机械爪或者机械臂产生碰撞,导致设备损坏,影响作业。
3、对于这样的问题,需要对进入传送装置的垃圾高度进行判断。判断传送装置上的物品高度有两种处理方法。第一种:通过一个高度限制机构对传送带上的“超高”垃圾进行拦截,但是有可能导致垃圾在高度限制机构堆积,影响传送。带运输垃圾的效果。第二种:使用光电传感器组成光电门,这样可以对指定高度的物体产生感应,但是在垃圾分类的环境中,空气中的灰尘和漂浮物会比较多,光电传感器容易受到影响导致识别率下降,同时需要定期对激光头进行清理,否则传感器表面的油污会影响检测的精度。
4、由此可见,在垃圾分筛过程中,垃圾过高,就会影响机械臂和机械爪运动,严重时会造成设备损坏;垃圾分类的环境比较恶劣,空气中的灰尘和漂浮物较多。
技术实现思路
1、针对现有技术的不足,本申请提供一种三轴机器人限高装置。
2、本申请提供的一种三轴机器人限高装置采用如下的技术方案:
3、一种三轴机器人限高装置,包括两个对称分布的立板、位于两个立板之间的限位板,所述限位板两侧均固定连接有销轴,所述销轴另一端转动插设于立板上,每个所述立板上均固定安装有光电传感器,其中一个所述立板上固定安装有行程开关,所述限位板设置于光电传感器与行程开关之间,调速完毕后,所述限位板正好与行程开关的推杆接触。
4、通过采用上述技术方案,首先,触发检测装置的主要组成部分是限位板和行程开关,光电检测装置的主要组成部分是立板和光电传感器,垃圾通过传送装置传送到触发检测装置处,当垃圾的高度达到限制高度时,会与限位板产生接触,限位板在触碰作用下抬起,行程开关的接触点会断开产生电平信号,并进行计时,垃圾再通过后面的一列光电传感器,根据光电传感器的电平信号就可以知道垃圾的高度,并将一系列数据传送给后面的机器人处理器,从而进行计算建模,规划机械爪和机械臂的工作路径,防止了触碰损坏,保护了设备。
5、优选的,所述立板内嵌设有微型轴承,所述销轴端部插设于所述微型轴承内。
6、通过采用上述技术方案,使得销轴更加顺畅的在微型轴承内部实现转动,降低端部的磨损。
7、优选的,所述立板表面开设有条形开口,所述条形开口靠近立板底端设置。
8、通过采用上述技术方案,能够方便的将立板固定在传送装置上,具体可以将螺栓端部穿过条形开口,拧入至传送装置的侧板表面开设的螺孔内。
9、优选的,所述立板的四角处均开设有圆角,所述立板的厚度为2-5mm。
10、通过采用上述技术方案,设置圆角保证手部接触时,不会被拐角的尖端磕碰,且立板的厚度适宜,保证结构强度的同时,降低重量。
11、综上所述,本申请包括以下至少一种有益技术效果:
12、1.本装置同时设置光电检测装置和触发检测装置,相互补充,提高了检测的稳定性。光电检测优点是反应迅速且准确,在检测中起主要作用,但是在垃圾分拣的过程中,埋藏在垃圾内部的灰尘和颗粒,会在传送过程中飞入空气之中,从而影响光电传感器的识别精度,导致识别的准确率下降;为了提高检测的稳定性,在光电检测装置之前增加了触动检测装置,通过与垃圾产生触动产生另外的信号,防止因为光电检测失效而导致误判断,保证了设备的正常运行。
13、2.本装置能够识别出垃圾的高度和相对位置,对垃圾的几何特征进行计算。垃圾通过传送装置,首先会与前面的触动检测装置产生接触(限位板抬起,行程开关产生信号,计算机开始计时),再通过后面的一组对射光电传感器,检测出是否有相应高度的物品通过,检测同时会将一系列数据传送给计算机,便可以通过算法计算出垃圾的高度和方位,最后下达指令给机械臂和机械爪放弃该区域的夹取工作。
14、3.本装置安装便捷,整体的结构较为简单。将光电传感器和行程传感器集合安装在立板上,简化了结构,同时立板为对称结构,在制作加工过程中不需要分为两个不同的左右板;立板通过螺栓安装在传送带的侧板上,再依次安装其他零件,只需要简单的安装调试,就可以投入到垃圾分筛流水线中。
技术特征:
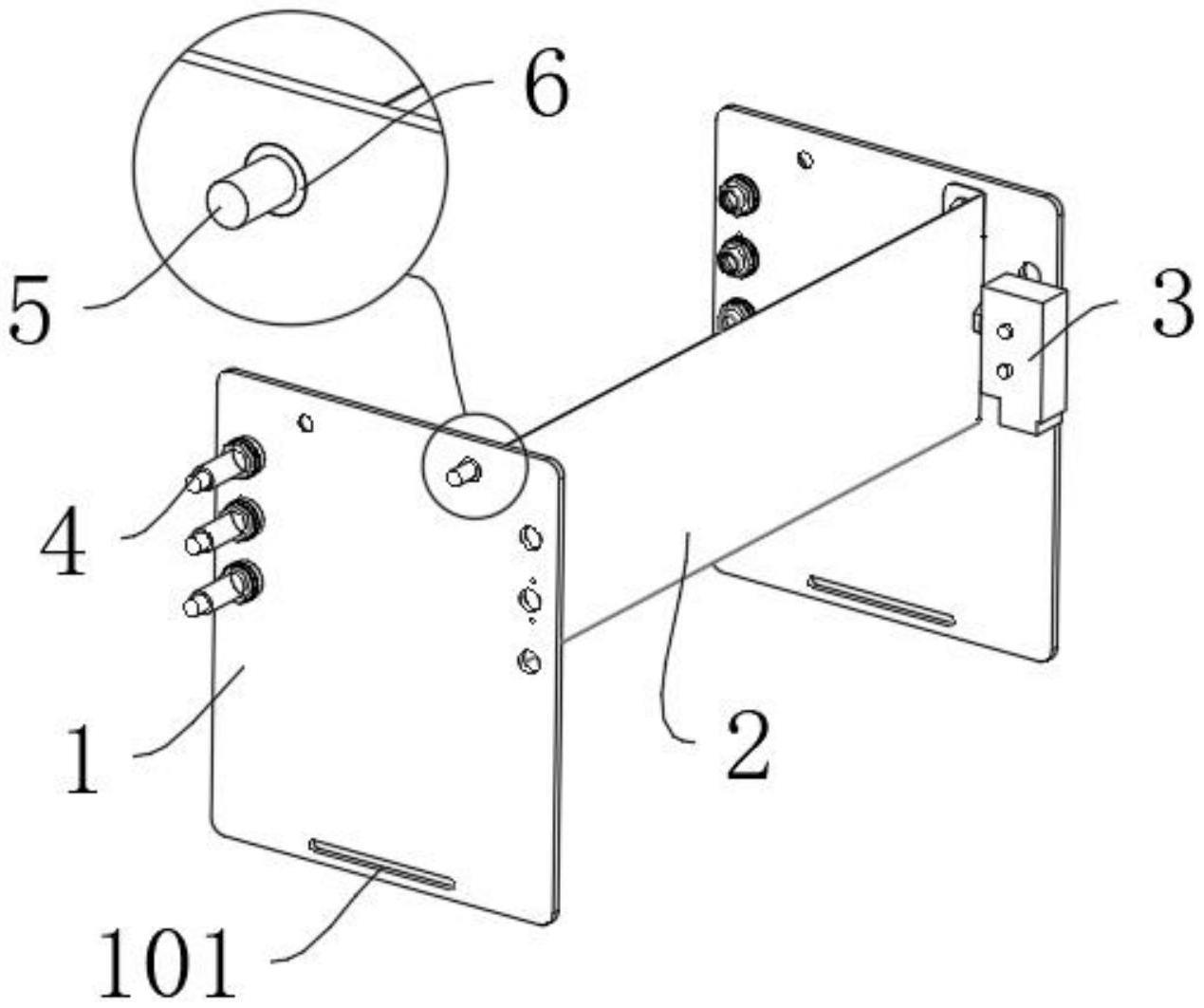
1.一种三轴机器人限高装置,其特征在于:包括两个对称分布的立板(1)、位于两个立板(1)之间的限位板(2),所述限位板(2)两侧均固定连接有销轴(5),所述销轴(5)另一端转动插设于立板(1)上,每个所述立板(1)上均固定安装有光电传感器(4),其中一个所述立板(1)上固定安装有行程开关(3),所述限位板(2)设置于光电传感器(4)与行程开关(3)之间,调速完毕后,所述限位板(2)正好与行程开关(3)的推杆接触。
2.根据权利要求1所述的一种三轴机器人限高装置,其特征在于:所述立板(1)内嵌设有微型轴承(6),所述销轴(5)端部插设于所述微型轴承(6)内。
3.根据权利要求1所述的一种三轴机器人限高装置,其特征在于:所述立板(1)表面开设有条形开口(101),所述条形开口(101)靠近立板(1)底端设置。
4.根据权利要求1所述的一种三轴机器人限高装置,其特征在于:所述立板(1)的四角处均开设有圆角,所述立板(1)的厚度为2-5mm。
技术总结
本申请涉及一种三轴机器人限高装置,包括两个对称分布的立板、位于两个立板之间的限位板,所述限位板两侧均固定连接有销轴,所述销轴另一端转动插设于立板上,每个所述立板上均固定安装有光电传感器,其中一个所述立板上固定安装有行程开关,所述限位板设置于光电传感器与行程开关之间,调速完毕后,所述限位板正好与行程开关的推杆接触。本申请同时设置光电检测装置和触发检测装置,提高检测稳定性;光电检测优点是反应迅速且准确,在垃圾分拣的过程中,灰尘会在传送过程中飞入空气之中,从而影响光电传感器的识别精度,导致识别的准确率下降;在光电检测装置之前增加触动检测装置,通过与垃圾接触产生信号,防止因光电检测失效而导致误判。
技术研发人员:李希卓,蔡智,王一冰,何亭萱,刘小军
受保护的技术使用者:广州九爪智能科技有限公司
技术研发日:20230630
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!