一种支撑活动仿真机器人的制作方法
本技术涉及机器人,尤其涉及一种支撑活动仿真机器人。
背景技术:
1、仿真机器人是指呈人形的机器人,其能够执行相应的动作,其可以用于玩具等领域,通过人形机器人与例如是婴幼儿进行交互,从而达到锻炼婴幼儿认知能力的目的。本申请旨在提供一种能够完成类似于俯卧撑的支撑活动的仿真机器人,具有结构简单,制造成本低的优点。
技术实现思路
1、本实用新型的目的在于克服现有技术的缺点,提供一种支撑活动仿真机器人。
2、本实用新型的目的通过以下技术方案来实现:一种支撑活动仿真机器人,包括机器人组件和驱动组件,所述机器人组件包括躯干、脚掌和手臂,所述驱动组件包括盒体,所述脚掌和所述手臂均设置于所述盒体上,躯干的第一端部铰接至所述脚掌,躯干的第二端部铰接至所述手臂,所述手臂能够沿盒体的宽度方向摆动,其中,在所述手臂摆动的情况下,第二端部与盒体之间的距离能够增大或减小。
3、优选的,所述盒体包括壳体和底板,所述壳体和所述底板彼此拼接以限定出中空型腔,所述驱动组件还包括设置于所述中空型腔中的驱动马达和齿轮组,所述齿轮组啮合至所述驱动马达,所述手臂啮合至所述齿轮组。
4、优选的,所述中空型腔中设置有齿轮箱,所述齿轮组设置于所述齿轮箱中,所述齿轮箱上设置有转动轴,手臂的端部连接至所述转动轴,其中,手臂的端部上设置有啮合至所述齿轮组的啮合齿。
5、优选的,所述壳体上设置有呈十字交叉状的定位标识。
6、优选的,所述底板上设置有电池盒。
7、优选的,所述底板上设置有若干个通孔。
8、本实用新型具有以下优点:
9、通过驱动马达能够为手臂的摆动提供驱动力,进而在手臂来回摆动时,能够使得机器人组件呈现出做俯卧撑的状态,进而达到提高机器人组件的仿真效果的目的。同时本申请的支撑活动仿真机器人结构简单,制造成本低。
技术特征:
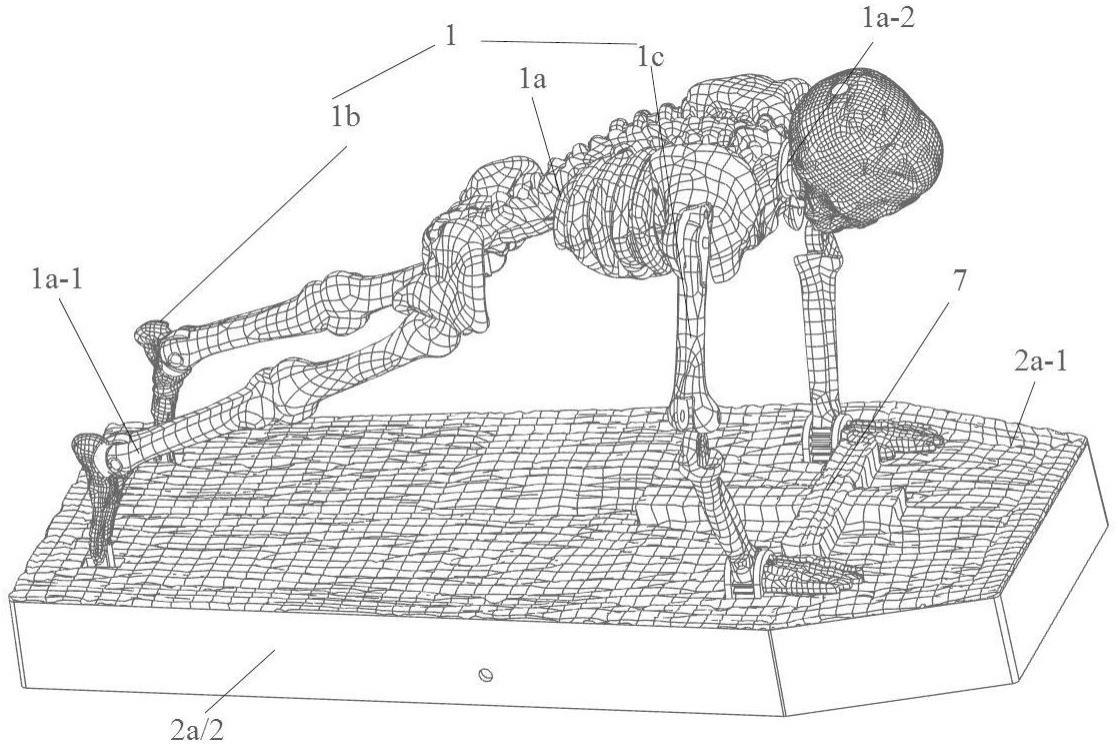
1.一种支撑活动仿真机器人,其特征在于,包括机器人组件(1)和驱动组件(2),所述机器人组件(1)包括躯干(1a)、脚掌(1b)和手臂(1c),所述驱动组件(2)包括盒体(2a),所述脚掌(1b)和所述手臂(1c)均设置于所述盒体(2a)上,躯干(1a)的第一端部(1a-1)铰接至所述脚掌(1b),躯干(1a)的第二端部(1a-2)铰接至所述手臂(1c),所述手臂(1c)能够沿盒体(2a)的宽度方向摆动,其中,在所述手臂(1c)摆动的情况下,第二端部(1a-2)与盒体(2a)之间的距离能够增大或减小。
2.根据权利要求1所述的支撑活动仿真机器人,其特征在于,所述盒体(2a)包括壳体(2a-1)和底板(2a-2),所述壳体(2a-1)和所述底板(2a-2)彼此拼接以限定出中空型腔(3),所述驱动组件(2)还包括设置于所述中空型腔(3)中的驱动马达(2b)和齿轮组(2c),所述齿轮组(2c)啮合至所述驱动马达(2b),所述手臂(1c)啮合至所述齿轮组(2c)。
3.根据权利要求2所述的支撑活动仿真机器人,其特征在于,所述中空型腔(3)中设置有齿轮箱(4),所述齿轮组(2c)设置于所述齿轮箱(4)中,所述齿轮箱(4)上设置有转动轴(5),手臂(1c)的端部连接至所述转动轴(5),其中,手臂(1c)的端部上设置有啮合至所述齿轮组(2c)的啮合齿(6)。
4.根据权利要求2所述的支撑活动仿真机器人,其特征在于,所述壳体(2a-1)上设置有呈十字交叉状的定位标识(7)。
5.根据权利要求2所述的支撑活动仿真机器人,其特征在于,所述底板(2a-2)上设置有电池盒(8)。
6.根据权利要求2所述的支撑活动仿真机器人,其特征在于,所述底板(2a-2)上设置有若干个通孔(9)。
技术总结
本技术公开了一种支撑活动仿真机器人,包括机器人组件和驱动组件,所述机器人组件包括躯干、脚掌和手臂,所述驱动组件包括盒体,所述脚掌和所述手臂均设置于所述盒体上,躯干的第一端部铰接至所述脚掌,躯干的第二端部铰接至所述手臂,所述手臂能够沿盒体的宽度方向摆动,其中,在所述手臂摆动的情况下,第二端部与盒体之间的距离能够增大或减小。本申请能够使得机器人组件呈现出做俯卧撑的状态,进而达到提高机器人组件的仿真效果的目的。
技术研发人员:可军锋
受保护的技术使用者:深圳市宏泰智能创意电子科技有限公司
技术研发日:20230630
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!