一种夹持机器人结构
本技术涉及夹持机器人,具体为一种夹持机器人结构。
背景技术:
1、工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
2、公开号为cn213946471u的专利公开了一种夹瓶用机器人夹持结构,包括固定座,所述固定座的底部栓接有电机箱,所述电机箱的内部栓接有电机,所述电机的输出轴栓接有第一螺纹杆,所述固定座顶部的左右两侧均铰接有夹持杆。该实用新型通过设置固定座、电机箱、电机、弹簧、固定板、横板和夹持结构,使得该装置具备了可以对被夹持物品进行缓冲,减小夹持过程中物品碎裂的风险,且可以调整夹持结构以便夹持不同直径的瓶子,但是该实用新型在夹取较重的瓶子时,因为只夹持瓶子的两侧,使得瓶子有脱落的风险,非常的危险。
技术实现思路
1、本实用新型的目的在于提供一种夹持机器人结构,用于克服现有技术中的上述缺陷。
2、根据本实用新型的一种夹持机器人结构,包括固定支架,所述固定支架下端面设有可移动的滑动块,所述滑动块下端面固定设有滑动板,所述滑动板内设有滑移腔,所述滑移腔前壁与所述滑动板前端面直接贯穿设有滑移槽;
3、所述滑移槽左右两侧对称设有两个可移动的滑移块,所述滑移腔左右两壁之间贯穿两个所述滑移块转动设有旋转轴,所述旋转轴与所述滑移块之间螺纹连接,所述滑动板右端面固定设有旋转电机,所述旋转轴右端动力连接于所述旋转电机。
4、优选的,所述滑动板下端面固定设有卡板箱,所述卡板箱前后两端面贯穿设有卡板腔。
5、优选的,所述卡板腔左右两壁设有开口向所述卡板腔且呈u型开口状的移动腔,所述卡板腔内设有可移动的卡位板。
6、优选的,所述卡位板左右两端面固定设有移动板,所述移动板延伸至所述移动腔内,所述移动腔前壁固定设有移动磁铁,所述移动腔前壁与所述移动板前端面之间设有移动弹簧。
7、优选的,所述滑移块前端面固定设有夹紧板,所述夹紧板穿过所述滑移槽向前延伸,所述夹紧板前侧靠近所述卡板腔的一侧面设有夹持槽。
8、优选的,所述夹持槽远离所述卡板腔的一侧壁内设有平移腔,所述平移腔内设有可移动的平移板,所述平移板靠近所述卡板腔的一侧面固定设有触动块,所述触动块延伸至所述夹持槽内。
9、优选的,所述平移板远离所述卡板腔的一侧面与所述平移腔远离所述卡板腔的右侧壁之间设有平移弹簧,所述平移腔远离所述卡板腔的右侧壁上固定设有停止开关。
10、与现有技术相比,本实用新型的优点是:
11、本实用新型在所述卡位板左右两端面固定设有移动板,所述移动板延伸至所述移动腔内,可以对夹持的物体进行支撑,使得夹持更加牢固,避免物体在搬运的过程中掉落。
12、2.本实用新型在所述夹持槽远离所述卡板腔的一侧壁内设有平移腔,所述平移腔内设有可移动的平移板,可以根据所夹持的物品的大小自动调节夹持的间距,避免夹坏物品。
技术特征:
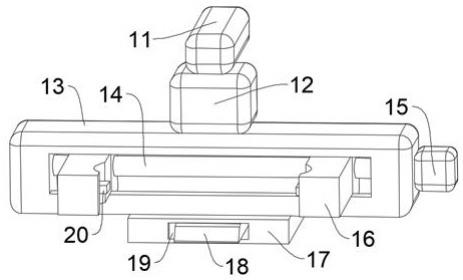
1.一种夹持机器人结构,包括固定支架(11),其特征在于:所述固定支架(11)下端面设有可移动的滑动块(12),所述滑动块(12)下端面固定设有滑动板(13),所述滑动板(13)内设有滑移腔(22),所述滑移腔(22)前壁与所述滑动板(13)前端面直接贯穿设有滑移槽(23);
2.根据权利要求1所述的一种夹持机器人结构,其特征在于:所述滑动板(13)下端面固定设有卡板箱(17),所述卡板箱(17)前后两端面贯穿设有卡板腔(19)。
3.根据权利要求2所述的一种夹持机器人结构,其特征在于:所述卡板腔(19)左右两壁设有开口向所述卡板腔(19)的移动腔(27),所述卡板腔(19)内设有可移动的卡位板(18)。
4.根据权利要求3所述的一种夹持机器人结构,其特征在于:所述卡位板(18)左右两端面固定设有移动板(25),所述移动板(25)延伸至所述移动腔(27)内,所述移动腔(27)前壁固定设有移动磁铁(28),所述移动腔(27)前壁与所述移动板(25)前端面之间设有移动弹簧(26)。
5.根据权利要求4所述的一种夹持机器人结构,其特征在于:所述滑移块(24)前端面固定设有夹紧板(16),所述夹紧板(16)穿过所述滑移槽(23)向前延伸,所述夹紧板(16)前侧靠近所述卡板腔(19)的一侧面设有夹持槽(21)。
6.根据权利要求5所述的一种夹持机器人结构,其特征在于:所述夹持槽(21)远离所述卡板腔(19)的一侧壁内设有平移腔(30),所述平移腔(30)内设有可移动的平移板(31),所述平移板(31)靠近所述卡板腔(19)的一侧面固定设有触动块(20),所述触动块(20)延伸至所述夹持槽(21)内。
7.根据权利要求6所述的一种夹持机器人结构,其特征在于:所述平移板(31)远离所述卡板腔(19)的一侧面与所述平移腔(30)远离所述卡板腔(19)的右侧壁之间设有平移弹簧(32),所述平移腔(30)远离所述卡板腔(19)的右侧壁上固定设有停止开关(29)。
技术总结
本技术公开了一种夹持机器人结构,包括固定支架,所述固定支架下端面设有可移动的滑动块,所述滑动块下端面固定设有滑动板,所述滑动板内设有滑移腔,所述滑移腔前壁与所述滑动板前端面直接贯穿设有滑移槽;所述滑移槽左右两侧对称设有两个可移动的滑移块,所述滑移腔左右两壁之间贯穿两个所述滑移块转动设有旋转轴,所述旋转轴与所述滑移块之间螺纹连接,所述滑动板右端面固定设有旋转电机,所述旋转轴右端动力连接于所述旋转电机。本技术结构,可以对夹持的物体进行支撑,使得夹持更加牢固,避免物体在搬运的过程中掉落;此外可以根据所夹持的物品的大小自动调节夹持的间距,避免夹坏物品。
技术研发人员:黄涵逸,戴浩凯,程钰翔,董大鑫,金恺诚,李柯,蔡姚杰,曹胜轲
受保护的技术使用者:浙江工业大学
技术研发日:20230704
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!