一种机器人机械手腕的制作方法
本技术涉及机械手,具体涉及一种机器人机械手腕。
背景技术:
1、由于科学技术的发展,越来越多的小型机器人逐渐被广泛用于各种危险的、情况复杂的和人类无法到达的环境中工作,人们需要通过机器人的运动或动作来执行某种特定的任务,这就需要用到机器人的运动关节。
2、目前市场上已有的机械手腕与机器臂之间连接关系比较复杂,安装和拆卸都非常麻烦,一旦发生故障,将机械手腕拆下维修和装上都需要耗费大量的时间。
3、因此,本领域技术人员提供了一种机器人机械手腕,以解决上述背景技术中提出的问题。
技术实现思路
1、为解决上述技术问题,本实用新型提供一种机器人机械手腕,包括机器人手腕主体,机器人手腕主体的底部设有支撑底板;
2、支撑底板上固定连接有控制器,支撑底板的上端连接固定柱,固定柱的内部设有外螺纹,固定柱的上侧衔接有伸缩杆,伸缩杆的颞部设有内螺纹;
3、伸缩杆的上端连接固定框一,固定框一的内部设有转动组件,转动组件包括电机一、转轴二和转动块,电机一的左侧连接转轴二,转轴二上转动连接有转动块。
4、优选的:所述支撑底板的四角紧固连接有固定螺栓,固定螺栓上设有紧固件。
5、优选的:所述转动块的右侧固定连接有固定框二,固定框二的内部设有电机二。
6、优选的:所述电机二的右侧连接螺杆,螺杆的尽头处设有紧固轴。
7、优选的:所述螺杆上螺纹连接有滑动块,滑动块的右侧连接液压杆。
8、优选的:所述液压杆伸出至固定框二的外部,液压杆的尽头处连接有固定块。
9、优选的:所述固定块的内部开设有凹槽,凹槽的内部设有传动组件。
10、优选的:所述传动组件包括电机三、转轴三、转盘三和导电线,电机三的右侧连接转轴三。
11、优选的:所述转轴三的右侧连接转盘,转盘的右侧设有导电线。
12、本实用新型的技术效果和优点:
13、1、本实用新型通过设置的固定柱、内螺纹、外螺纹和伸缩杆的设置,实现对该机械手腕之间的拆卸,且拆卸方便快捷,不需要耗费大量时间。
14、2、通过设置的伸缩杆实现对该机器人机械手腕的高度的升降,通过设置的转动组件中的电机一、转轴二和转动块,实现对该机器人机械手腕角度的转换,通过设置的传动组件中的导电线的后侧壁面与转盘的前侧壁面相贴合,保障了接触良好,动力传输稳定。
技术特征:
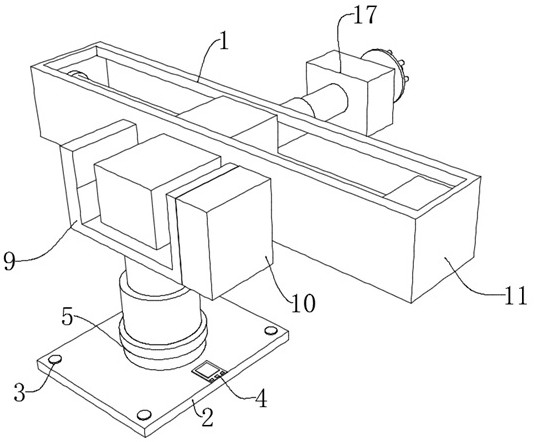
1.一种机器人机械手腕,包括机器人手腕主体(1),其特征在于,所述机器人手腕主体(1)的底部设有支撑底板(2);
2.根据权利要求1所述的一种机器人机械手腕,其特征在于,所述支撑底板(2)的四角紧固连接有固定螺栓(3),固定螺栓(3)上设有紧固件。
3.根据权利要求1所述的一种机器人机械手腕,其特征在于,所述转动块(103)的右侧固定连接有固定框二(11),固定框二(11)的内部设有电机二(12)。
4.根据权利要求3所述的一种机器人机械手腕,其特征在于,所述电机二(12)的右侧连接螺杆(13),螺杆(13)的尽头处设有紧固轴(14)。
5.根据权利要求4所述的一种机器人机械手腕,其特征在于,所述螺杆(13)上螺纹连接有滑动块(15),滑动块(15)的右侧连接液压杆(16)。
6.根据权利要求5所述的一种机器人机械手腕,其特征在于,所述液压杆(16)伸出至固定框二(11)的外部,液压杆(16)的尽头处连接有固定块(17)。
7.根据权利要求6所述的一种机器人机械手腕,其特征在于,所述固定块(17)的内部开设有凹槽,凹槽的内部设有传动组件(18)。
8.根据权利要求7所述的一种机器人机械手腕,其特征在于,所述传动组件(18)包括电机三(181)、转轴三(182)、转盘三(183)和导电线(184),电机三(181)的右侧连接转轴三(182)。
9.根据权利要求8所述的一种机器人机械手腕,其特征在于,所述转轴三(182)的右侧连接转盘三(183),转盘三(183)的右侧设有导电线(184)。
技术总结
本技术涉及机械手领域,具体涉及一种机器人机械手腕,包括机器人手腕主体,机器人手腕主体的底部设有支撑底板,支撑底板上固定连接有控制器,支撑底板的上端连接固定柱,固定柱的内部设有外螺纹,固定柱的上侧衔接有伸缩杆,伸缩杆的颞部设有内螺纹。本技术通过设置的固定柱、内螺纹、外螺纹和伸缩杆的设置,实现对该机械手腕之间的拆卸,且拆卸方便快捷,不需要耗费大量时间。通过设置的伸缩杆实现对该机器人机械手腕的高度的升降,通过设置的转动组件中的电机一、转轴二和转动块,实现对该机器人机械手腕角度的转换,通过设置的传动组件中的导电线的后侧壁面与转盘的前侧壁面相贴合,保障了接触良好,动力传输稳定。
技术研发人员:唐锋,张益茬,孙同耀,郭满
受保护的技术使用者:上海埃曼机器人有限公司
技术研发日:20230707
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!