一种紧凑设计的机械臂的制作方法
本技术涉及机械臂,具体为一种紧凑设计的机械臂。
背景技术:
1、现有技术中机械臂普遍由多个模块化的关节组件构成,其有较高的自由度,适合于几乎任何轨迹或角度的工作,可以自由编程,完成全自动化的工作,适合用于诸多工业领域的机械自动化作业。
2、然而,现有的机械臂普遍体积较大,对于空间较小的操作空间不仅难以灵活施展而且安装方式也较为局限,难以发挥机械臂较高的自由度,在现有技术基础上具备优化改进的空间。
3、于是,有鉴于此,针对现有的结构不足予以研究改良,提出一种紧凑设计的机械臂。
技术实现思路
1、本实用新型的目的在于提供一种紧凑设计的机械臂,以解决上述背景技术中提出的问题。
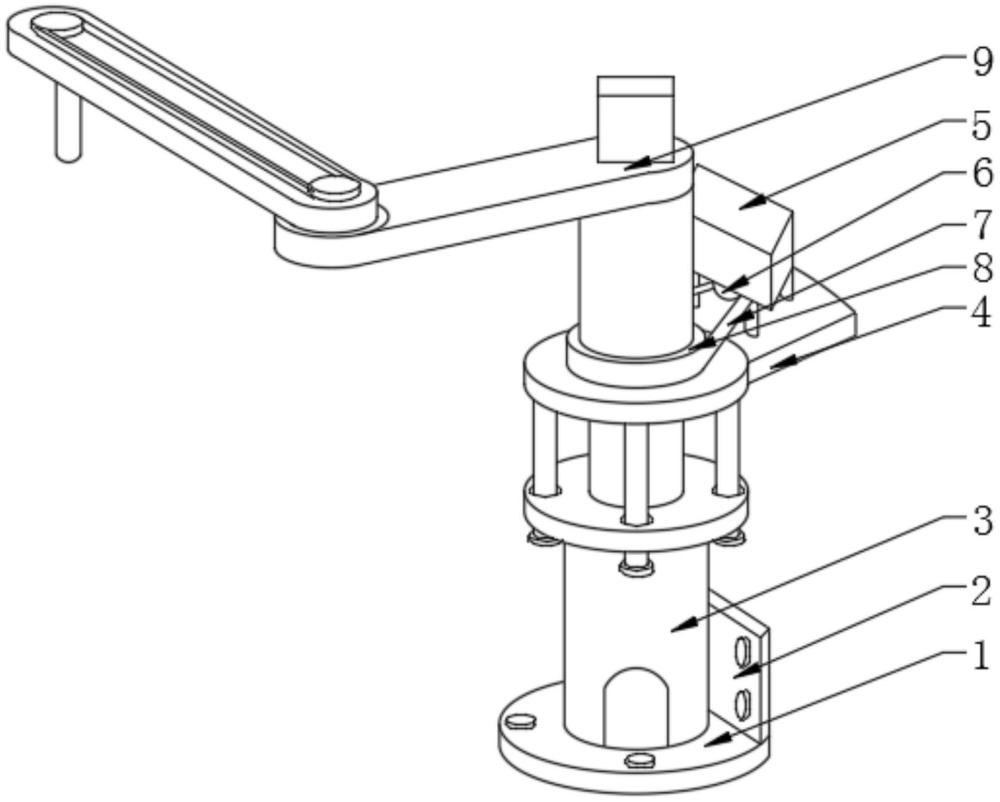
2、为实现上述目的,本实用新型提供如下技术方案:一种紧凑设计的机械臂,包括法兰和升降组件,所述法兰通过螺栓与工作台相固定,且法兰侧面一体式固定安装有耳板,并且耳板通过螺栓与墙面相固定,所述升降组件固定安装于法兰顶部,所述升降组件包括设备仓、端板、气缸、伸缩杆、升降平台和导杆,所述设备仓顶部固定安装有端板,且设备仓内置有气缸,所述气缸顶部输出端固连有伸缩杆,且伸缩杆末端固定安装有升降平台,所述升降平台通过四周导杆与端板四周孔洞滑动配合。
3、进一步的,所述升降平台侧面一体式固定安装有延伸板,且延伸板顶部通过支柱固定安装有减速电机。
4、进一步的,所述减速电机底部输出端固定连接有皮带轮,且皮带轮圆周环绕有传动皮带。
5、进一步的,所述传动皮带背离皮带轮一端旋转传动连接有转盘,且转盘转动安装于升降平台顶部中端。
6、进一步的,所述转盘顶部共轴安装有传动组件,所述传动组件包括转动平台、摆臂一和摆臂二,所述转动平台左侧固定延伸有摆臂一,且摆臂一末端转动连接有摆臂二。
7、进一步的,所述传动组件还包括伺服电机和同步轮,所述转动平台顶部固定安装有伺服电机,且伺服电机底部输出端固定连接有同步轮。
8、进一步的,所述传动组件还包括同步带一和工形轴,所述同步轮圆周环绕有同步带一,且同步带一背离同步轮一端套装于工形轴底端,并且工形轴转动安装于摆臂一末端。
9、进一步的,所述传动组件还包括同步带二和轴杆,所述工形轴顶端圆周环绕有同步带二,且同步带二末端旋转传动连接有轴杆。
10、与现有技术相比,本实用新型具有以下有益效果:
11、1.本实用新型通过升降组件的设置,在调整机械臂整体应用高度时,由设备仓内置气缸通过伸缩杆实现对升降平台的伸缩传动,升降平台通过四周导杆与设备仓顶部端板四周孔洞滑动配合,保障升降行程的稳定,可在不停机状态下动态调整机械臂整体应用高度,此外,机械臂整体可选通过法兰固定于工作台上,还可选通过耳板将机械臂整体固定于墙壁上,在较为局促的应用空间内提供两种不同的安装方式,使得机械臂可以发挥应有的灵活性;
12、2.本实用新型在使用时,减速电机通过皮带轮外套装的传动皮带向位于升降平台上方转动安装的转盘旋转传动,进而调整转动平台及其左侧固定的摆臂一的转动角度,摆臂一末端转动连接有摆臂二,使得本申请机械臂具有多个活动关节,具备较高自由度,通过传动组件的设置,伺服电机通过同步轮外套装的同步带一,向位于摆臂一末端的工形轴旋转传动,与此同步的是,共形轴通过同步带二向位于摆臂二末端的轴杆旋转传动,实现机械臂输出末端的精细动作。
技术特征:
1.一种紧凑设计的机械臂,其特征在于,包括法兰(1)和升降组件(3),所述法兰(1)通过螺栓与工作台相固定,且法兰(1)侧面一体式固定安装有耳板(2),并且耳板(2)通过螺栓与墙面相固定,所述升降组件(3)固定安装于法兰(1)顶部,所述升降组件(3)包括设备仓(301)、端板(302)、气缸(303)、伸缩杆(304)、升降平台(305)和导杆(306),所述设备仓(301)顶部固定安装有端板(302),且设备仓(301)内置有气缸(303),所述气缸(303)顶部输出端固连有伸缩杆(304),且伸缩杆(304)末端固定安装有升降平台(305),所述升降平台(305)通过四周导杆(306)与端板(302)四周孔洞滑动配合。
2.根据权利要求1所述的一种紧凑设计的机械臂,其特征在于,所述升降平台(305)侧面一体式固定安装有延伸板(4),且延伸板(4)顶部通过支柱固定安装有减速电机(5)。
3.根据权利要求2所述的一种紧凑设计的机械臂,其特征在于,所述减速电机(5)底部输出端固定连接有皮带轮(6),且皮带轮(6)圆周环绕有传动皮带(7)。
4.根据权利要求3所述的一种紧凑设计的机械臂,其特征在于,所述传动皮带(7)背离皮带轮(6)一端旋转传动连接有转盘(8),且转盘(8)转动安装于升降平台(305)顶部中端。
5.根据权利要求4所述的一种紧凑设计的机械臂,其特征在于,所述转盘(8)顶部共轴安装有传动组件(9),所述传动组件(9)包括转动平台(901)、摆臂一(902)和摆臂二(903),所述转动平台(901)左侧固定延伸有摆臂一(902),且摆臂一(902)末端转动连接有摆臂二(903)。
6.根据权利要求5所述的一种紧凑设计的机械臂,其特征在于,所述传动组件(9)还包括伺服电机(904)和同步轮(905),所述转动平台(901)顶部固定安装有伺服电机(904),且伺服电机(904)底部输出端固定连接有同步轮(905)。
7.根据权利要求6所述的一种紧凑设计的机械臂,其特征在于,所述传动组件(9)还包括同步带一(906)和工形轴(907),所述同步轮(905)圆周环绕有同步带一(906),且同步带一(906)背离同步轮(905)一端套装于工形轴(907)底端,并且工形轴(907)转动安装于摆臂一(902)末端。
8.根据权利要求7所述的一种紧凑设计的机械臂,其特征在于,所述传动组件(9)还包括同步带二(908)和轴杆(909),所述工形轴(907)顶端圆周环绕有同步带二(908),且同步带二(908)末端旋转传动连接有轴杆(909)。
技术总结
本技术公开了一种紧凑设计的机械臂,涉及机械臂技术领域,包括法兰和升降组件,所述法兰通过螺栓与工作台相固定,且法兰侧面一体式固定安装有耳板,并且耳板通过螺栓与墙面相固定。本申请提供一种紧凑设计的机械臂,通过升降组件的设置,在调整机械臂整体应用高度时,由设备仓内置气缸通过伸缩杆实现对升降平台的伸缩传动,升降平台通过四周导杆与设备仓顶部端板四周孔洞滑动配合,保障升降行程的稳定,可在不停机状态下动态调整机械臂整体应用高度,此外,机械臂整体可选通过法兰固定于工作台上,还可选通过耳板将机械臂整体固定于墙壁上,在较为局促的应用空间内提供两种不同的安装方式,使得机械臂可以发挥应有的灵活性。
技术研发人员:刘明明
受保护的技术使用者:昆山视杰维光电科技有限公司
技术研发日:20230707
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!