一种机器人末端执行器的制作方法
本技术涉及自动化生产设备,更具体地,涉及一种机器人末端执行器。
背景技术:
1、目前,x荧光光谱分析仪检测用玻璃片的制备目前基本上由人工操作完成。即:按照既定的配比,人工分别精确称量熔剂和需要分析成分的粉末物料,再进行混匀、添加脱模剂及高温熔融的操作。人工方法劳动强度大,且流程复杂,检测结果容易受操作人员技能水平和熟练程度制约;
2、在一种新型全自动称量熔样系统中,采用了单体设备实现各环节功能+机器人在各工位间搬运的模式,将x荧光分析用玻璃融片制样过程实现了全自动化。需要注意的是,在系统运行过程中,机器人要同时承担搬运坩埚和熔融后成型的玻璃片的任务。目前同类产品只能通过针对性设计的夹具实现某一物品的搬运转移,无法同时搬运不同种类物品。
技术实现思路
1、有鉴于此,本实用新型的目的在于提供一种机器人末端执行器,以解决现有技术中存在的问题。
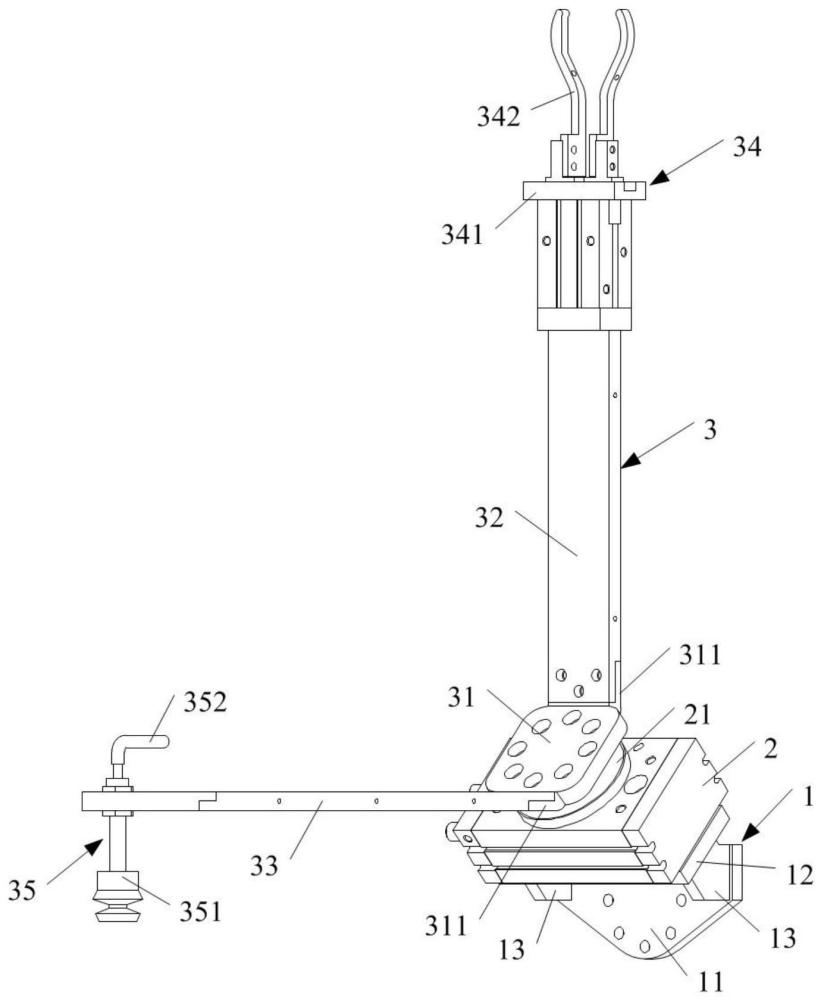
2、根据本实用新型,提供一种机器人末端执行器,其包括安装座、摆动气缸以及组合夹具;其中,
3、所述摆动气缸固定连接于所述安装座上,所述安装座用于固定连接于机器人的机械臂末端;
4、所述组合夹具包括气缸法兰、第一法兰连接板、第二法兰连接板、夹取机构以及吸附机构,所述气缸法兰固定连接于所述摆动气缸的转盘上,所述第一法兰连接板和第二法兰连接板均固定连接于所述气缸法兰上,所述夹取机构设于所述第一法兰连接板上远离所述气缸法兰的一端,所述吸附机构设于所述第二法兰连接板上远离所述气缸法兰的一端;
5、所述摆动气缸可驱动所述组合夹具旋转,以使所述夹取机构或吸附机构切换至工作位置。
6、优选地,所述安装座包括第一安装板、第二安装板以及两个过渡板,两个所述过渡板固设于所述第一安装板与第二安装板之间,所述摆动气缸固定连接于所述第二安装板上,所述第一安装板用于连接在所述机器人的机械臂末端。
7、优选地,所述第一安装板与第二安装板之间呈第一预设角度设置;
8、所述第一法兰连接板和第二法兰连接板与所述摆动气缸的转盘轴线之间也呈所述第一预设角度设置。
9、优选地,所述第一预设角度为45°。
10、优选地,所述摆动气缸为180度摆动气缸;
11、所述第一法兰连接板与第二法兰连接板沿所述摆动气缸的转盘周向间隔180度设置。
12、优选地,所述气缸法兰上设有两个连接端板,所述第一法兰连接板和第二法兰连接板分别固定连接在两个所述连接端板上。
13、优选地,所述第一法兰连接板和第二法兰连接板分别通过多个螺栓固定连接在两个所述连接端板上。
14、优选地,所述夹取机构包括气动夹爪和两个夹杆,两个所述夹杆分别固定连接在所述气动夹爪的两个夹爪上,两个所述夹杆的前端分别设有与待夹持物品形状相匹配的夹持部。
15、优选地,所述吸附机构包括气动吸盘以及与所述气动吸盘相连接的气体管路;
16、所述气动吸盘固设在所述第二法兰连接板上,所述气体管路的一端与所述气动吸盘相连接,所述气体管路的另一端与真空发生器相连接。
17、本实用新型提供的机器人末端执行器,其包括摆动气缸和组合夹具,组合夹具上设有用于夹取机构和吸附机构,工业机器人可根据需求,通过摆动气缸可驱动组合夹具旋转,以使夹取机构或吸附机构切换到工作位置,以实现搬运不同种类的物品。
技术特征:
1.一种机器人末端执行器,其特征在于,包括安装座、摆动气缸以及组合夹具;其中,
2.根据权利要求1所述的机器人末端执行器,其特征在于,所述安装座包括第一安装板、第二安装板以及两个过渡板,两个所述过渡板固设于所述第一安装板与第二安装板之间,所述摆动气缸固定连接于所述第二安装板上,所述第一安装板用于连接在所述机器人的机械臂末端。
3.根据权利要求2所述的机器人末端执行器,其特征在于,所述第一安装板与第二安装板之间呈第一预设角度设置;
4.根据权利要求3所述的机器人末端执行器,其特征在于,所述第一预设角度为45°。
5.根据权利要求1所述的机器人末端执行器,其特征在于,所述摆动气缸为180度摆动气缸;
6.根据权利要求1所述的机器人末端执行器,其特征在于,所述气缸法兰上设有两个连接端板,所述第一法兰连接板和第二法兰连接板分别固定连接在两个所述连接端板上。
7.根据权利要求6所述的机器人末端执行器,其特征在于,所述第一法兰连接板和第二法兰连接板分别通过多个螺栓固定连接在两个所述连接端板上。
8.根据权利要求1所述的机器人末端执行器,其特征在于,所述夹取机构包括气动夹爪和两个夹杆,两个所述夹杆分别固定连接在所述气动夹爪的两个夹爪上,两个所述夹杆的前端分别设有与待夹持物品形状相匹配的夹持部。
9.根据权利要求1所述的机器人末端执行器,其特征在于,所述吸附机构包括气动吸盘以及与所述气动吸盘相连接的气体管路;
技术总结
本技术涉及一种机器人末端执行器,其包括安装座、摆动气缸以及组合夹具;其中,所述摆动气缸固定连接于安装座上,所述安装座用于固定连接于机器人的机械臂末端;所述组合夹具包括气缸法兰、第一法兰连接板、第二法兰连接板、夹取机构以及吸附机构,所述气缸法兰固定连接于摆动气缸的转盘上,所述第一法兰连接板和第二法兰连接板均固定连接于气缸法兰上,所述夹取机构设于第一法兰连接板上远离气缸法兰的一端,所述吸附机构设于第二法兰连接板上远离气缸法兰的一端。该机器人末端执行器安装于机器人上进行使用,机器人可根据需求,通过摆动气缸驱动组合夹具旋转,以使所述夹取机构或吸附机构切换至工作位置,以实现搬运不同种类的物品。
技术研发人员:周远祥,张雷,董俊强,席斌,王嘉琪,赵智,万琦芬,涂昀
受保护的技术使用者:天津海禧仪器仪表有限公司
技术研发日:20230707
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!