一种铸造用5轴机械手的制作方法
本技术涉及自动化,具体是一种铸造用5轴机械手。
背景技术:
1、现有机床上下料自动化技术中,工业机器人一般是六轴配置,这两种工业机器人都是第一轴轴固定不动的,不能横向或纵向大范围的转移工业机器人的位置,导致一台机器只能供应一台设备的情况,如果要机器人同时供应两台以上的设备运行或远距离上下料,提高生产效率,则显得有点力不从心了,基于此种情况,一种新设计的5轴侧置(机器人底座可以侧面安装)工业机械手便应运而生了。在一些特殊使用的场合,比如压铸或注塑行业,在辅助第一轴的帮助下,这种既可以横向或纵向移动,又可以很方便的安装在设备的顶端,而且不占空间的上下料铸造用5轴机械手便显的十分具有优越性、可行性。
2、一般情况下,工业机器人上下料使用六轴工业机器人,这种六轴工业机器人的底座一般都是固定不动的(如附图1所示),机器人的6个轴都是固定在底座上,虽然工业机器人6个轴可以在空间内自由旋转,但对于压铸或注塑行业的上下料就显的不够用了。
3、1、一些行业机床上下料的时,由于机床设备比较大,而机器人取得的料又需要送到较远的地方放置码垛,这样普通6轴工业机器人臂展就短了,就需要增加6轴工业机器人的臂展,如果直接在普通6轴工业机器人的基础上增加1横向或纵向移动轴,可以是可以,但机器人变成7轴了,成本又较高,重量大,所需空间也较大,所以不是优选方案。
4、2、普通6轴工业机器人,一般是地面安装的,地面安装的机器人用于较大机床的上下料,需要增加一个高的底座,同时机器人也只能放置在机床设备的一边,从而占用较大空间,由于是侧面上下料,空间的要求及机器人末端执行器的大小尺寸要求也较高,不是优选方案。
技术实现思路
1、本实用新型的目的在于提供一种铸造用5轴机械手,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
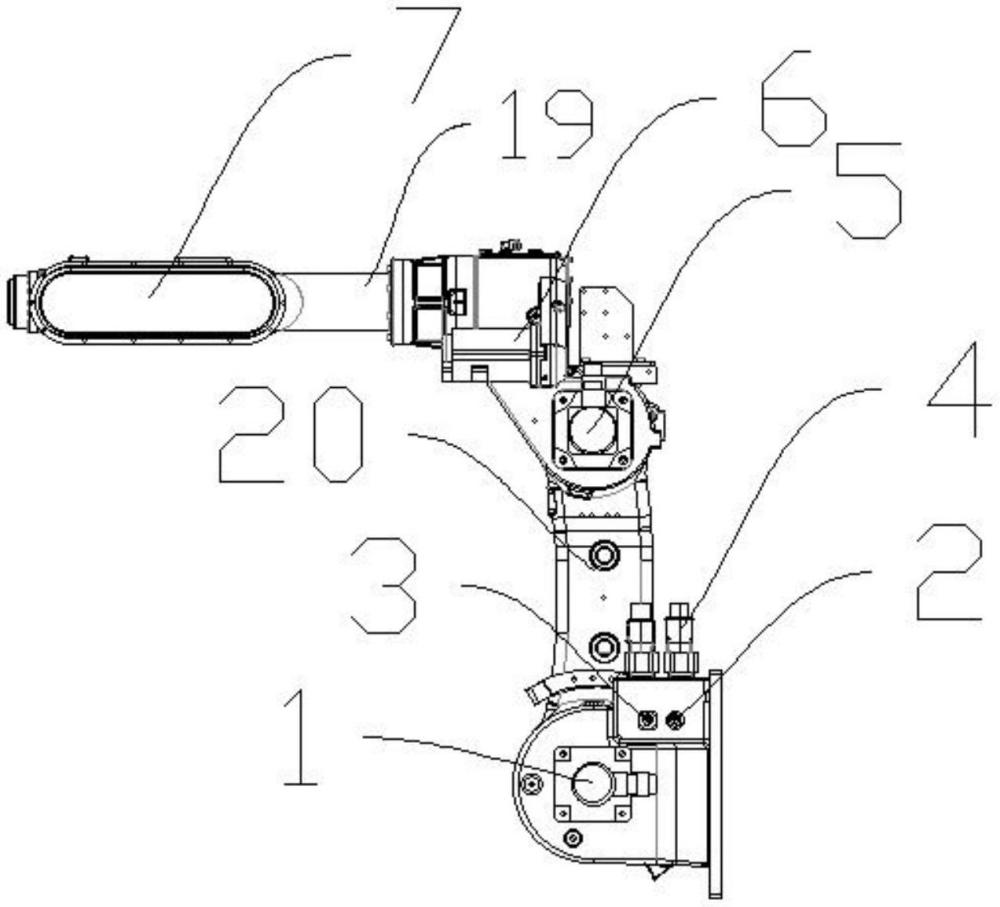
3、一种铸造用5轴机械手,包括第一轴、气路快速接头、io接头、重载航插接头、第二轴、第三轴、第四/五轴、轴机械手侧面安装孔、太阳轮、伺服电机、底座、减速机、平键、螺钉、压铸机、铸造用五轴机械手、附加轴、机械手横向导轨、连接杆、连接柱;所述压铸机上端设置有机械手横向导轨,所述机械手横向导轨上端设置有铸造用五轴机械手,所述机械手横向导轨左端面上端设置有附加轴,所述铸造用五轴机械手上端设置有底座,所述底座上端设置有减速机,所述减速机通过螺钉与底座固定连接,所述铸造用五轴机械手下端设置有第一轴,所述第一轴上端设置有伺服电机,所述伺服电机上端设置有平键,所述平键上端设置有太阳轮,所述太阳轮上端设置有螺钉,所述太阳轮通过螺钉与伺服电机固定连接,所述底座上端设置有气路快速接头,所述底座上端面设置有一对重载航插接头,所述气路快速接头左侧设置有io接头,所述第一轴上端设置有连接柱,所述连接柱与第一轴活动连接,所述连接柱上端设置有第二轴,所述第二轴上端设置有第三轴,所述第三轴上端活动连接有连接杆,所述连接杆上端设置有第四/五轴。
4、与现有技术相比,本实用新型的有益效果是:将机械手横移导轨安装在压铸机上,将铸造用5轴机械手安装在机械手横移导轨上,将附加轴有机械手横移导轨安装在一起,这样在接通电源之后,便可实现铸造用5轴机械手在机械手横移导轨上的左右移动,从而大大扩展了铸造用5轴机械手的运动范围,使该实用新型设计铸造用5轴机械手方便、有效、又不占用空间的使用在铸造机床的上下料方面,
5、1、铸造用5轴机械手方便侧装在压铸机床上,重量较普通6轴机器人轻,速度更快
6、2、铸造用5轴机械手方便安装在横向或纵向移动的滑轨上,运动范围大大增加
7、3、铸造用5轴机械手与其安装滑轨都安装在压铸机床的上面,不占空间,充分体现了其空间的优越性
8、4、铸造用5轴机械手由于是侧装,末端执行器下探距离远,各轴运动灵活性高,可以满足不同压铸机床的使用,通用行好
9、5、铸造用5轴机械手与外边附加紧密连接,布线走线均方便
技术特征:
1.一种铸造用5轴机械手,包括第一轴(1)、气路快速接头(2)、io接头(3)、重载航插接头(4)、第二轴(5)、第三轴(6)、第四/五轴(7)、轴机械手侧面安装孔(8)、太阳轮(9)、伺服电机(10)、底座(11)、减速机(12)、平键(13)、螺钉(14)、压铸机(15)、铸造用五轴机械手(16)、附加轴(17)、机械手横向导轨(18)、连接杆(19)、连接柱(20);其特征在于,所述压铸机(15)上端设置有机械手横向导轨(18),所述机械手横向导轨(18)上端设置有铸造用五轴机械手(16),所述机械手横向导轨(18)左端面上端设置有附加轴(17),所述铸造用五轴机械手(16)上端设置有底座(11),所述底座(11)上端设置有减速机(12)。
2.根据权利要求1所述的一种铸造用5轴机械手,其特征在于,所述减速机(12)通过螺钉与底座(11)固定连接,所述铸造用五轴机械手(16)下端设置有第一轴(1),所述第一轴(1)上端设置有伺服电机(10)。
3.根据权利要求1所述的一种铸造用5轴机械手,其特征在于,所述伺服电机(10)上端设置有平键(13),所述平键(13)上端设置有太阳轮(9),所述太阳轮(9)上端设置有螺钉(14),所述太阳轮(9)通过螺钉(14)与伺服电机(10)固定连接。
4.根据权利要求1所述的一种铸造用5轴机械手,其特征在于,所述底座(11)上端设置有气路快速接头(2),所述底座(11)上端面设置有一对重载航插接头(4),所述气路快速接头(2)左侧设置有io接头(3)。
5.根据权利要求1所述的一种铸造用5轴机械手,其特征在于,所述第一轴(1)上端设置有连接柱(20),所述连接柱(20)与第一轴(1)活动连接,所述连接柱(20)上端设置有第二轴(5)。
6.根据权利要求1所述的一种铸造用5轴机械手,其特征在于,所述第二轴(5)上端设置有第三轴(6),所述第三轴(6)上端活动连接有连接杆(19),所述连接杆(19)上端设置有第四/五轴(7)。
技术总结
本技术公开了一种铸造用5轴机械手,包括第一轴、气路快速接头、IO接头,将机械手横移导轨安装在压铸机上,将铸造用5轴机械手安装在机械手横移导轨上,将附加轴有机械手横移导轨安装在一起,这样在接通电源之后,便可实现铸造用5轴机械手在机械手横移导轨上的左右移动,从而大大扩展了铸造用5轴机械手的运动范围,使该技术设计铸造用5轴机械手方便、有效、又不占用空间的使用在铸造机床的上下料方面。
技术研发人员:王海永,陶才江,邓奎峰,刘金伟
受保护的技术使用者:上海柴孚机器人有限公司
技术研发日:20230707
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!