一种工业机器人用防撞底座
本技术涉及工业机器人,特别涉及一种工业机器人用防撞底座。
背景技术:
1、工业机器人主要应用于工业生产加工中,可以代替人力进行一些繁杂的生产工作,因此工业机器人被广泛应用于电子、物流、化工等行业中,工业机器人通常都安装在相应的底座上进行使用。
2、相关技术中,如中国专利申请号为:202020927227.1的工业机器人安装底座,包括安装板,所述安装板的顶端开设有四个安装孔,所述安装板的底端固定连有四个支杆,每个所述支杆的底端均固定连接有固定板,每个所述固定板的外表面均开设有固定孔,所述支杆的底端之间通过连接板固定连接,每个所述连接板的内侧均固定连接有套筒,每个所述套筒的内部均滑动连接有滑动板,每个所述滑动板的底端均安装有滑轮。
3、该专利虽然能够方向移动,但是,不具备防撞的功能,使用起来不够安全。
技术实现思路
1、为了克服现有技术的不足,本实用新型的目的之一在于提供一种工业机器人用防撞底座,通过设置的基座组件、防撞组件,能够对基座主体部分提供全方位的防撞功能,并且可以向内侧收回,从而节省占据的空间,保证工业机器人的正常工作,使用起来十分方便、安全。
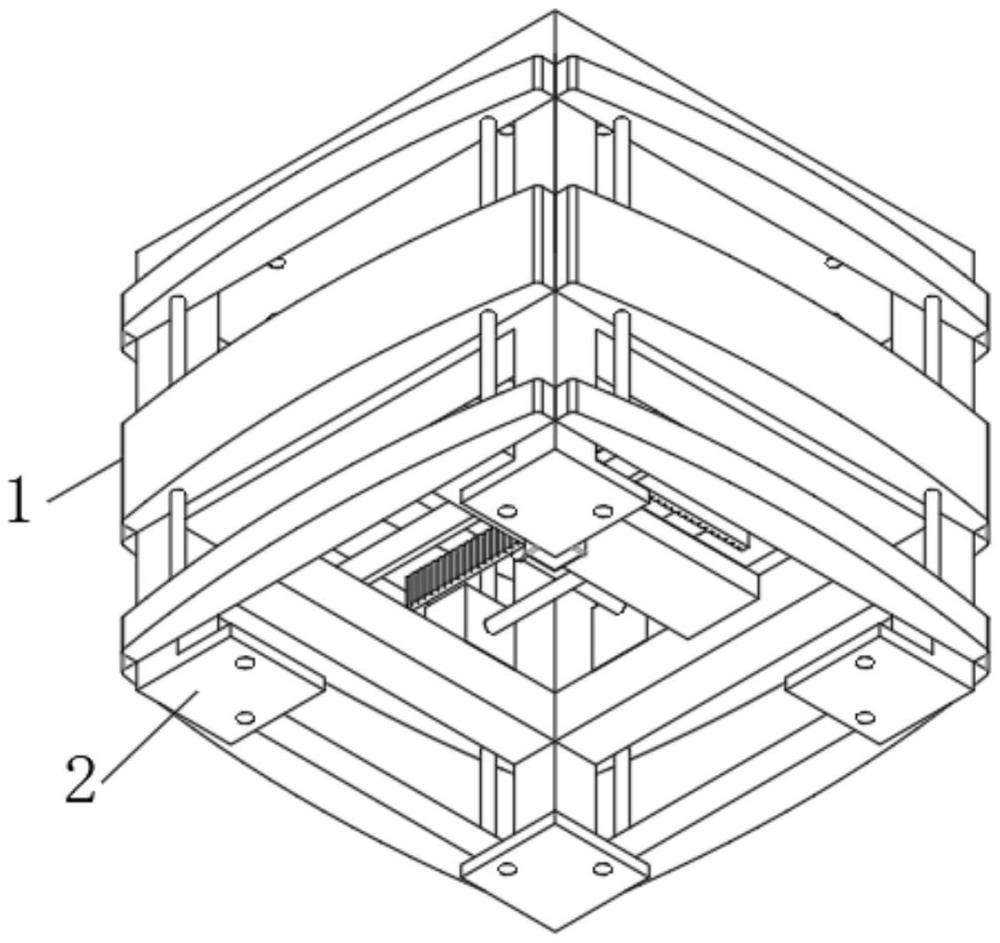
2、本实用新型的目的之一采用如下技术方案实现:一种工业机器人用防撞底座,包括:基座组件、防撞组件,所述基座组件包括基座主体,所述基座主体的中部固定连接有安装板,所述基座主体的中部对称固定连接有滑座一、滑座二;所述防撞组件包括滑动安装于滑座一和滑座二上的限位杆、固定安装于安装板上的电机,所述限位杆的外侧端固定连接有主防撞板,所述主防撞板的上下两侧均固定连接有连接杆,所述连接杆远离主防撞板的一端固定连接有副防撞板,所述主防撞板的内侧固定连接有控制齿板,所述电机的输出端穿过安装板固定连接有控制齿轮,所述控制齿轮与控制齿板相互啮合。通过设置的基座组件、防撞组件,能够对基座主体部分提供全方位的防撞功能,并且可以向内侧收回,从而节省占据的空间,保证工业机器人的正常工作,使用起来十分方便、安全。
3、根据所述的一种工业机器人用防撞底座,所述基座主体的下部固定连接有安装脚,所述安装脚上设置有安装孔,所述安装脚的数量有四个,且为轴对称设置。
4、根据所述的一种工业机器人用防撞底座,所述滑座一、滑座二的数量均有四个,且均为两个为一组。
5、提供所述的一种工业机器人用防撞底座,所述限位杆的数量一共有八个,四个为一组,每组之间相互错开设置。
6、根据所述的一种工业机器人用防撞底座,所述控制齿板的数量一共有四个,两个为一组,每组之间相互错开设置。
7、根据所述的一种工业机器人用防撞底座,所述限位杆的内侧端固定连接有限位块。
8、根据所述的一种工业机器人用防撞底座,所述主防撞板的体积大于副防撞板的体积。
9、根据所述的一种工业机器人用防撞底座,所述主防撞板、副防撞板均位于基座主体的外侧。
10、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种工业机器人用防撞底座,其特征在于,包括:基座组件(1)、防撞组件(2),所述基座组件(1)包括基座主体(101),所述基座主体(101)的中部固定连接有安装板(105),所述基座主体(101)的中部对称固定连接有滑座一(102)、滑座二(103);所述防撞组件(2)包括滑动安装于滑座一(102)和滑座二(103)上的限位杆(205)、固定安装于安装板(105)上的电机(208),所述限位杆(205)的外侧端固定连接有主防撞板(201),所述主防撞板(201)的上下两侧均固定连接有连接杆(202),所述连接杆(202)远离主防撞板(201)的一端固定连接有副防撞板(203),所述主防撞板(201)的内侧固定连接有控制齿板(204),所述电机(208)的输出端穿过安装板(105)固定连接有控制齿轮(207),所述控制齿轮(207)与控制齿板(204)相互啮合。
2.根据权利要求1所述的一种工业机器人用防撞底座,其特征在于,所述基座主体(101)的下部固定连接有安装脚(104),所述安装脚(104)上设置有安装孔,所述安装脚(104)的数量有四个,且为轴对称设置。
3.根据权利要求2所述的一种工业机器人用防撞底座,其特征在于,所述滑座一(102)、滑座二(103)的数量均有四个,且均为两个为一组。
4.根据权利要求3所述的一种工业机器人用防撞底座,其特征在于,所述限位杆(205)的数量一共有八个,四个为一组,每组之间相互错开设置。
5.根据权利要求4所述的一种工业机器人用防撞底座,其特征在于,所述控制齿板(204)的数量一共有四个,两个为一组,每组之间相互错开设置。
6.根据权利要求5所述的一种工业机器人用防撞底座,其特征在于,所述限位杆(205)的内侧端固定连接有限位块(206)。
7.根据权利要求6所述的一种工业机器人用防撞底座,其特征在于,所述主防撞板(201)的体积大于副防撞板(203)的体积。
8.根据权利要求7所述的一种工业机器人用防撞底座,其特征在于,所述主防撞板(201)、副防撞板(203)均位于基座主体(101)的外侧。
技术总结
本技术公开了一种工业机器人用防撞底座,涉及工业机器人技术领域,其包括:基座组件、防撞组件,所述基座组件包括基座主体,所述基座主体的中部固定连接有安装板,所述基座主体的中部对称固定连接有滑座一、滑座二;所述防撞组件包括滑动安装于滑座一和滑座二上的限位杆、固定安装于安装板上的电机,所述限位杆的外侧端固定连接有主防撞板,所述主防撞板的上下两侧均固定连接有连接杆。通过设置的基座组件、防撞组件,能够对基座主体部分提供全方位的防撞功能,并且可以向内侧收回,从而节省占据的空间,保证工业机器人的正常工作,使用起来十分方便、安全。
技术研发人员:杨跃,赵国宏,唐兴贵
受保护的技术使用者:昆明工业职业技术学院
技术研发日:20230711
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!