异物打捞机器人的制作方法
本技术涉及核电站辅助设备,尤其是涉及一种异物打捞机器人。
背景技术:
1、核电厂对于堆水池中的异物管控严格,大修期间需要对堆内进行详细检查,确保堆水池、堆芯、堆内构建内无异物。由于一些关键部位有遮挡,目视观察和水下摄像机辅助观察工具无法全部覆盖,且发现的异物需要处理和打捞,传统的长杆工具打捞无法实现全覆盖,且操作难度大,对操作人员来说存在一定的安全隐患。
2、目前核电厂选择使用打捞机器人替代传统工具,对异物进行打捞,但是现有的打捞机器人受自身形状及大小的限制,不能进入堆内下部构件底部,也无法抵达堆内下部构件的栅格面等一些特定位置,故无法对特殊位置的异物进行清理。
技术实现思路
1、针对现有打捞工具无法对堆内下部构件内部的异物进行清理的问题,本实用新型提供一种改进的异物打捞机器人。
2、本实用新型采用如下技术方案:
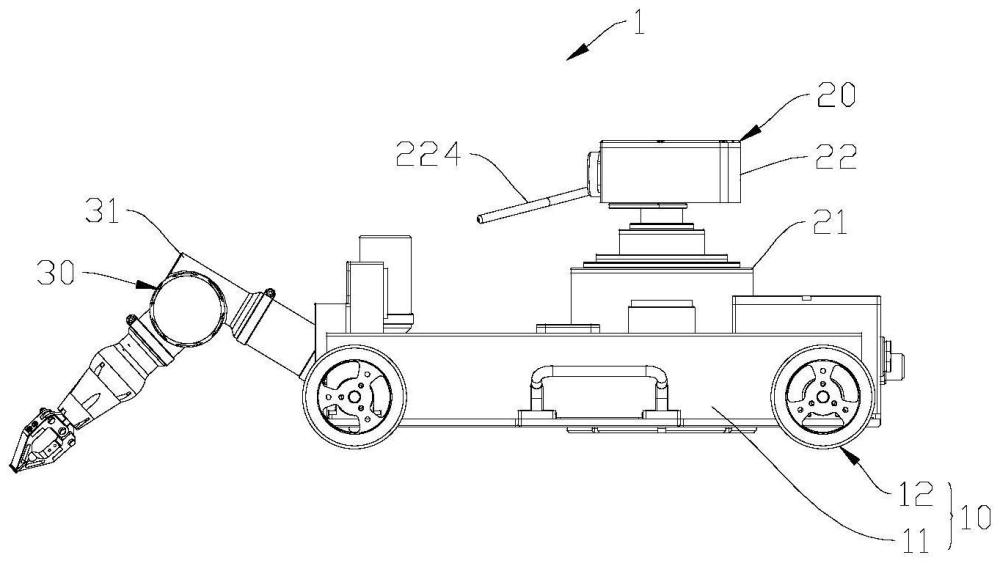
3、构造一种异物打捞机器人,用于打捞核反应堆水下异物,包括:
4、移动平台;
5、异物清理装置,所述异物清理装置设置于所述移动平台上,包括:
6、升降机构;以及
7、用于检测并清理堆内下部构件内异物的异物清理组件,所述异物清理组件设置于所述升降机构上,并包括用于检测堆内下部构件内是否存在异物的检测相机以及用于清理检测堆内下部构件内的异物的吹喷部件。
8、在一些实施例中,所述异物清理组件可绕一个纵轴线转动地设置于所述升降机构上。
9、在一些实施例中,所述升降机构包括升降缸,所述升降缸的下端连接于所述移动平台,所述异物清理组件设置于所述升降缸的上端。
10、在一些实施例中,所述吹喷部件可围绕一个水平轴线转动地设置。
11、在一些实施例中,所述异物清理组件还包括动力机构以及齿轮机构,所述齿轮机构连接于所述动力机构以及所述吹喷部件之间。
12、在一些实施例中,所述异物清理组件还包括至少一个第一照明部件,所述至少一个第一照明部件的照明方向与所述检测相机的镜头朝向相同。
13、在一些实施例中,所述异物清理装置还包括两个对中观察摄像机以及两个第二照明部件,所述两个对中观察摄像机以及所述两个第二照明部件均设置于所述移动平台上,所述两个对中观察摄像机的镜头分别朝上设置,且分别设置于所述升降机构的相邻侧;
14、所述两个第二照明部件分别与所述两个对中观察摄像机对应设置,且其照明方向与所述两个对中观察摄像机的镜头朝向相同。
15、在一些实施例中,所述异物打捞机器人还包括用于拾取堆水池底部异物的拾取装置,所述拾取装置设置于所述移动平台的前端。
16、在一些实施例中,所述拾取装置包括机械臂,所述机械臂设置于所述移动平台的前端,包括依次连接的底座、底座关节、第一转接座、连接臂、连接关节、第二转接座以及机械手,所述机械手可拆卸地设置于所述第二转接座上。
17、在一些实施例中,所述拾取装置还包括至少一个前向观察摄像机以及至少一个第三照明部件,所述至少一个前向观察摄像机以及所述至少一个第三照明部件均设置于所述移动平台的前端,且所述至少一个前向观察摄像机的镜头朝前设置,所述至少一个第三照明部件的照明方向与所述至少一个前向观察摄像机的镜头朝向相同。
18、本实用新型具有如下优点:
19、本实用新型通过设置升降机构和吹喷部件,能够伸入堆内下部构件的内部,针对难以清理的狭小空间内的异物进行清理。
技术特征:
1.一种异物打捞机器人,用于打捞核反应堆水下异物,其特征在于,包括:
2.根据权利要求1所述的异物打捞机器人,其特征在于,所述异物清理组件(22)可绕一个纵轴线转动地设置于所述升降机构(21)上。
3.根据权利要求1所述的异物打捞机器人,其特征在于,所述升降机构(21)包括升降缸(211),所述升降缸(211)的下端连接于所述移动平台(10),所述异物清理组件(22)设置于所述升降缸(211)的上端。
4.根据权利要求1所述的异物打捞机器人,其特征在于,所述吹喷部件(224)可围绕一个水平轴线转动地设置。
5.根据权利要求4所述的异物打捞机器人,其特征在于,所述异物清理组件(22)还包括动力机构(225)以及齿轮机构(226),所述齿轮机构(226)连接于所述动力机构(225)以及所述吹喷部件(224)之间。
6.根据权利要求1所述的异物打捞机器人,其特征在于,所述异物清理组件(22)还包括至少一个第一照明部件(223),所述至少一个第一照明部件(223)的照明方向与所述检测相机(222)的镜头朝向相同。
7.根据权利要求1所述的异物打捞机器人,其特征在于,所述异物清理装置(20)还包括两个对中观察摄像机(24)以及两个第二照明部件(25),所述两个对中观察摄像机(24)以及所述两个第二照明部件(25)均设置于所述移动平台(10)上,所述两个对中观察摄像机(24)的镜头分别朝上设置,且分别设置于所述升降机构(21)的相邻侧;
8.根据权利要求1所述的异物打捞机器人,其特征在于,所述异物打捞机器人还包括用于拾取堆水池底部异物的拾取装置(30),所述拾取装置(30)设置于所述移动平台(10)的前端。
9.根据权利要求8所述的异物打捞机器人,其特征在于,所述拾取装置(30)包括机械臂(31),所述机械臂(31)设置于所述移动平台(10)的前端,包括依次连接的底座(311)、底座关节(312)、第一转接座(313)、连接臂(314)、连接关节(315)、第二转接座(316)以及机械手(317),所述机械手(317)可拆卸地设置于所述第二转接座(316)上。
10.根据权利要求8所述的异物打捞机器人,其特征在于,所述拾取装置(30)还包括至少一个前向观察摄像机(32)以及至少一个第三照明部件(33),所述至少一个前向观察摄像机(32)以及所述至少一个第三照明部件(33)均设置于所述移动平台(10)的前端,且所述至少一个前向观察摄像机(32)的镜头朝前设置,所述至少一个第三照明部件(33)的照明方向与所述至少一个前向观察摄像机(32)的镜头朝向相同。
技术总结
本技术涉及一种异物打捞机器人,用于打捞核反应堆水下异物,包括移动平台以及异物清理装置,所述异物清理装置设置于所述移动平台上,包括升降机构以及用于检测并清理堆内下部构件内异物的异物清理组件;所述异物清理组件设置于所述升降机构上,并包括用于检测堆内下部构件内是否存在异物的检测相机以及用于清理检测堆内下部构件内的异物的吹喷部件。本技术通过设置能够伸入堆内下部构件的内部,针对难以清理的狭小空间内的异物进行清理。
技术研发人员:吴光耀,赫英杰,郭新维,韩小雷,张志刚,杨军,吕金才,李冬鹏,刘坤
受保护的技术使用者:台山核电合营有限公司
技术研发日:20230711
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!