一种智能可调节支架的制作方法
本技术涉及支架,尤其涉及一种智能可调节支架。
背景技术:
1、目前对于自动化加工的加工头或者检测设备的检测头的驱动,一般是通过三轴驱动滑台对其进行驱动,使其在xyz三轴进行驱动,或者时通过自动化机械臂进行驱动,通过三轴驱动滑台进行驱动,驱动精度较低,有时无法满足工作需求,通过机器人机械臂进行驱动,虽然可以满足驱动精度,但是机械臂的费用较高,因此目前还缺少一种能够满足高精度驱动并且成本较低的设备。
技术实现思路
1、鉴于此,本实用新型公开了一种智能可调节支架,能够提升驱动精度,并且成本相对较低。
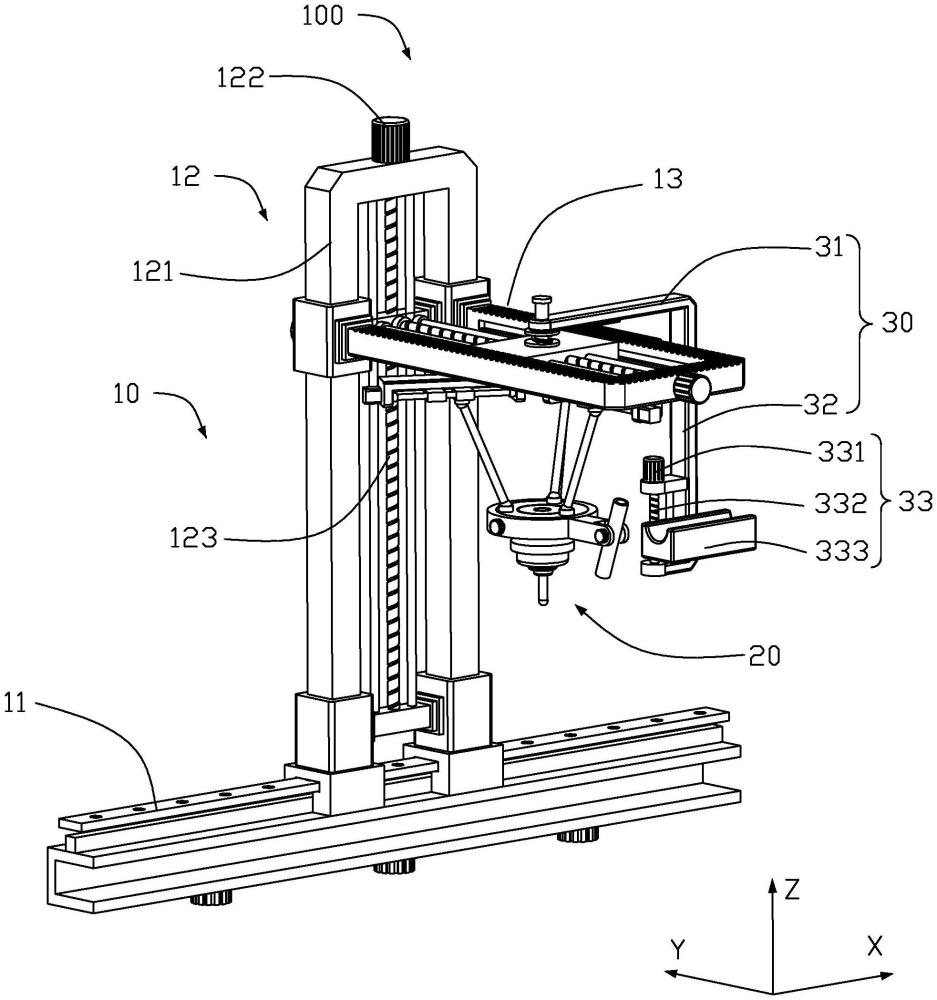
2、本实用新型公开了一种智能可调节支架,包括第一调节机构以及摆臂机构,其中,
3、所述第一调节机构可带动所述摆臂机构在x轴、y轴以及z轴方向移动;
4、所述摆臂机构包括安装板、工作平台以及三个驱动机构,所述工作平台设置在所述安装板的下方,三个所述驱动机构设置在所述工作平台与所述安装板之间并且沿中心轴均匀分布,所述驱动机构包括驱动组件以及连杆,所述连杆的两端分别通过万向球结构连接所述工作平台以及所述驱动组件,所述驱动组件与所述安装板固定连接可带动所述连杆的顶端向靠近或远离所述中心轴的方向移动。
5、进一步的,所述第一调节机构包括第一导轨、第一丝杆驱动组件和第二丝杆驱动组件,所述第一丝杆驱动组件与所述第一导轨在x轴方向滑动配合,所述第一丝杆驱动组件可驱动所述第二丝杆驱动组件在z轴方向移动,所述第二丝杆驱动组件可驱动所述安装板在y轴方向移动。
6、进一步的,所述第一丝杆驱动组件包括第一支架、第一驱动电机以及第一丝杆,所述第一支架与所述第一导轨在x轴方向滑动配合,所述第一丝杆竖直分布并且与所述第一支架转动连接,所述第二丝杆驱动组件与所述第一支架在z轴方向滑动配合,并且与所述第一丝杆传动连接,所述第一驱动电机可通过驱动所述第一丝杆转动以带动所述第二丝杆驱动组件沿所述第一支架在z轴方向移动。
7、进一步的,所述第二丝杆驱动组件包括第二支架、第二驱动电机以及第二丝杆,所述第二支架与所述第一支架在z轴方向滑动配合,所述第二丝杆与所述第二支架转动连接,所述安装板与所述第二支架滑动配合并且与所述第二丝杆螺纹配合,所述第二驱动电机通过驱动所述第二丝杆转动以驱动所述安装板在y轴方向滑动。
8、进一步的,所述驱动组件包括第三支架、第三驱动电机、第三丝杆以及连接块,所述第三支架与所述安装板固定连接,所述第三丝杆与所述第三支架转动配合,所述连接块与所述第三支架滑动连接并且与所述第三丝杆螺纹配合,所述第三驱动电机可通过所述第三丝杆驱动所述连接块向靠近或远离所述中心轴的方向移动;
9、所述连杆的顶端通过万向球结构与所述连接块活动配合。
10、进一步的,所述工作平台的底端用于安装工作部件,所述工作平台的一侧向外延伸形成固定架,所述固定架上固定设置有第一识别相机。
11、进一步的,还包括第二识别相机,所述第二识别相机通过连接架与所述安装板连接,所述连接架包括第一连接部和第二连接部,所述第一连接部的一端与所述安装板的顶端转动连接,所述第一连接部的另一端与所述第二连接部连接,所述第二连接部与所述第一连接部垂直配合,所述第二连接部的底端通过调节装置连接所述第二识别相机;
12、所述第一连接部与所述第二连接部呈90度夹角分布。
13、进一步的,所述调节装置包括第四驱动电机、第四丝杆以及治具块,所述第四丝杆与所述第二连接部转动配合,所述第四驱动电机可通过所述第四丝杆驱动所述治具块在z轴方向移动,所述第二识别相机设置于所述治具块。
14、本实用新型公开的技术方案,与现有技术相比,有益效果是:
15、通过第一调节机构带动所述摆臂机构在xyz三轴上移动,可实现对所述摆臂机构的空间位置调节;通过三个驱动装置联动,实现三个连杆的摆动,可进一步调节工作平台的位置,进而对设置在工作平台的上相关结构进行高精度调整;结构简单,成本较低。
技术特征:
1.一种智能可调节支架,其特征在于,包括第一调节机构以及摆臂机构,其中,
2.根据权利要求1所述的智能可调节支架,其特征在于,所述第一调节机构包括第一导轨、第一丝杆驱动组件和第二丝杆驱动组件,所述第一丝杆驱动组件与所述第一导轨在x轴方向滑动配合,所述第一丝杆驱动组件可驱动所述第二丝杆驱动组件在z轴方向移动,所述第二丝杆驱动组件可驱动所述安装板在y轴方向移动。
3.根据权利要求2所述的智能可调节支架,其特征在于,所述第一丝杆驱动组件包括第一支架、第一驱动电机以及第一丝杆,所述第一支架与所述第一导轨在x轴方向滑动配合,所述第一丝杆竖直分布并且与所述第一支架转动连接,所述第二丝杆驱动组件与所述第一支架在z轴方向滑动配合,并且与所述第一丝杆传动连接,所述第一驱动电机可通过驱动所述第一丝杆转动以带动所述第二丝杆驱动组件沿所述第一支架在z轴方向移动。
4.根据权利要求3所述的智能可调节支架,其特征在于,所述第二丝杆驱动组件包括第二支架、第二驱动电机以及第二丝杆,所述第二支架与所述第一支架在z轴方向滑动配合,所述第二丝杆与所述第二支架转动连接,所述安装板与所述第二支架滑动配合并且与所述第二丝杆螺纹配合,所述第二驱动电机通过驱动所述第二丝杆转动以驱动所述安装板在y轴方向滑动。
5.根据权利要求4所述的智能可调节支架,其特征在于,所述驱动组件包括第三支架、第三驱动电机、第三丝杆以及连接块,所述第三支架与所述安装板固定连接,所述第三丝杆与所述第三支架转动配合,所述连接块与所述第三支架滑动连接并且与所述第三丝杆螺纹配合,所述第三驱动电机可通过所述第三丝杆驱动所述连接块向靠近或远离所述中心轴的方向移动;
6.根据权利要求5所述的智能可调节支架,其特征在于,所述工作平台的底端用于安装工作部件,所述工作平台的一侧向外延伸形成固定架,所述固定架上固定设置有第一识别相机。
7.根据权利要求6所述的智能可调节支架,其特征在于,还包括第二识别相机,所述第二识别相机通过连接架与所述安装板连接,所述连接架包括第一连接部和第二连接部,所述第一连接部的一端与所述安装板的顶端转动连接,所述第一连接部的另一端与所述第二连接部连接,所述第二连接部与所述第一连接部垂直配合,所述第二连接部的底端通过调节装置连接所述第二识别相机;
8.根据权利要求7所述的智能可调节支架,其特征在于,所述调节装置包括第四驱动电机、第四丝杆以及治具块,所述第四丝杆与所述第二连接部转动配合,所述第四驱动电机可通过所述第四丝杆驱动所述治具块在z轴方向移动,所述第二识别相机设置于所述治具块。
技术总结
本技术公开了一种智能可调节支架,包括第一调节机构以及摆臂机构,所述第一调节机构可带动所述摆臂机构在X轴、Y轴以及Z轴方向移动;所述摆臂机构包括安装板、工作平台以及三个驱动机构,所述工作平台设置在所述安装板的下方,三个所述驱动机构设置在所述工作平台与所述安装板之间并且沿中心轴均匀分布,所述驱动机构包括驱动组件以及连杆,所述连杆的两端分别通过万向球结构连接所述工作平台以及所述驱动组件,所述驱动组件与所述安装板固定连接可带动所述连杆的顶端向靠近或远离所述中心轴的方向移动,通过上述结构实现对工作平台的多角度驱动,提升驱动精度,并且结构简单,成本较低。
技术研发人员:王平
受保护的技术使用者:美格智能技术股份有限公司
技术研发日:20230714
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!