一种仿人机器人单向摆动结构的制作方法
本技术涉及仿人机器人领域,尤其涉及一种仿人机器人单向摆动结构。
背景技术:
1、仿人机器人各关节中有一些只需要单向摆动,一个运动自由度的功能,例如手指关节、膝关节等。
2、现在仿人机器人单向摆动的摆动轴心一般设置在摆动零件截面的形心位置,例如圆形摆动零件的圆心位置。
3、护工需要比一般人更有力量,来抱起行动不便的病人,因此,当采用人形机器人代替护工的工作时,需要人形机器人具有超出一般人的力量,这种力量体现在人形机器人的关节上时,就是关节的摆动力矩。
技术实现思路
1、为了提高单向摆动关节的摆动力矩,本实用新型采用将摆动轴心设置在摆动零件截面的一端,而将摆动推(拉)力点设在摆动零件截面的另一端,以此增大摆动力臂。
2、本实用新型采用以下技术方案实现:一种仿人机器人单向摆动结构,包括:
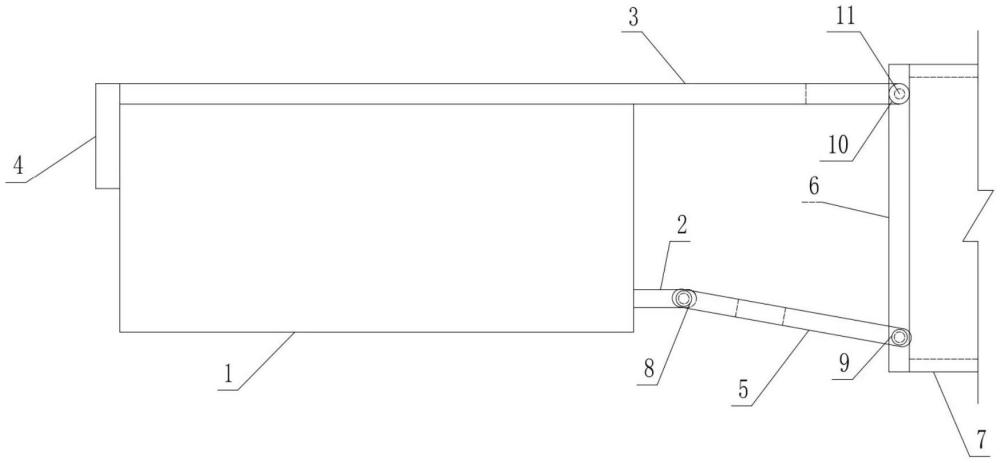
3、动力装置固定架、动力装置、动力装置传力杆、动力连接杆、摆动零件固定杆、摆动零件、铰a、铰b和铰c,动力装置固定架的外部固定有动力装置,动力装置的一端连接有动力装置传力杆,动力装置传力杆的另一端与动力连接杆的一端采用铰a连接,动力连接杆的另一端与摆动零件固定杆的一端采用铰b连接,摆动零件固定杆固定在摆动零件上;以及
4、动力装置固定架的动力装置固定杆的一端与摆动零件固定杆的另一端采用铰c连接;以及
5、所述铰a的中心轴线、铰b的中心轴线和铰c中心轴线相互平行;以及
6、所述动力装置传力杆由动力装置提供其相对动力装置进行直线运动的动力,当动力装置传力杆进行直线运动时,通过铰a将运动力传递给动力连接杆,再由铰b将运动力传递给摆动零件固定杆,使摆动零件固定杆绕铰c中心轴线转动。
7、作为上述方案的进一步改进,所述动力连接杆为杆件,两头的中间均开槽,形成u形槽,并在u形槽开口端部槽壁中间开铰孔。
8、作为上述方案的进一步改进,所述动力装置固定架由动力装置固定板和动力装置固定杆组成,所述动力装置固定板与动力装置固定杆相互固定。
9、作为上述方案的进一步改进,所述动力装置固定杆为杆件,所述动力装置固定杆与摆动零件固定杆相连端开槽,形成u形槽,并在u形槽开口端部槽壁中间开铰孔。
10、作为上述方案的进一步改进,所述动力装置传力杆与动力连接杆采用铰a相连的位置开铰孔。
11、作为上述方案的进一步改进,所述摆动零件固定杆与动力连接杆、动力装置固定杆分别采用铰b和铰c相连的位置开铰孔。
12、相比现有技术,本实用新型的有益效果在于:
13、1.本实用新型可用于人形机器人的膝关节,也可用于肘关节、手指关节,本实用新型结构简单,且由于铰a和铰c的垂直距离大于铰到摆动零件截面形心的距离,因此,本实用新型在同等的动力条件时,较摆动零件截面形心为转动轴心的构件,输出的转动力矩大。
技术特征:
1.一种仿人机器人单向摆动结构,其特征在于,包括:
2.根据权利要求1所述的一种仿人机器人单向摆动结构,其特征在于,所述动力连接杆(5)为杆件,两头的中间均开槽,形成u形槽,并在u形槽开口端部槽壁中间开铰孔。
3.根据权利要求1所述的一种仿人机器人单向摆动结构,其特征在于,所述动力装置固定架由动力装置固定板(4)和动力装置固定杆(3)组成,所述动力装置固定板(4)与动力装置固定杆(3)相互固定。
4.根据权利要求1所述的一种仿人机器人单向摆动结构,其特征在于,所述动力装置固定杆(3)为杆件,所述动力装置固定杆(3)与摆动零件固定杆(6)相连端开槽,形成u形槽,并在u形槽开口端部槽壁中间开铰孔。
5.根据权利要求1所述的一种仿人机器人单向摆动结构,其特征在于,所述动力装置传力杆(2)与动力连接杆(5)采用铰a(8)相连的位置开铰孔。
6.根据权利要求1所述的一种仿人机器人单向摆动结构,其特征在于,所述摆动零件固定杆(6)与动力连接杆(5)、动力装置固定杆(3)分别采用铰b(9)和铰c(10)相连的位置开铰孔。
技术总结
本技术涉及仿人机器人领域,公开了一种仿人机器人单向摆动结构,包括动力装置固定架,用于固定动力装置,其一端采用铰C与摆动零件固定杆连接;动力装置一端连接动力装置传力杆,动力装置提供动力装置传力杆运动动力,动力装置传力杆运动动力经铰A,传递到动力连接杆,再经铰B传递到摆动零件固定杆上,使摆动零件固定杆绕铰C中心轴线转动,摆动零件固定杆与摆动零件固定,从而实现了摆动零件绕铰C中心轴线摆动的目的。本技术可用于人形机器人的膝关节,也可用于肘关节、手指关节,由于铰A和铰C的垂直距离大于铰到摆动零件截面形心的距离,因此,本技术较摆动零件截面形心为转动轴心的构件,相同动力时,输出的转动力矩大。
技术研发人员:梁勇智
受保护的技术使用者:梁勇智
技术研发日:20230716
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!