一种悬挂式轨道巡检机器人的制作方法
本技术涉及机器人,尤其涉及一种悬挂式轨道巡检机器人。
背景技术:
1、变电站是电力系统的重要组成部分,变电设备可靠运行对保障电力系统安全稳定运行有着重要意义。对变电设备进行巡检、及时发现设备缺陷隐患并消缺是保障电网安全稳定运行、提高供电可靠性的常规基础工作。目前电网企业普遍采用人工方式,通过运检人员对变电设备进行定期巡检或特殊巡检。人工巡检作业需要运行人员近距离看、听、闻、嗅,作业时需携带大量的检测仪器,存在劳动强度大、工作效率低、人身安全无保障、人机工效差等问题,同时受运行人员素质、恶劣气候条件影响,巡检质量不稳定,管理成本高,容易产生漏判、误判。
技术实现思路
1、本申请为了解决上述技术问题提供一种悬挂式轨道巡检机器人。
2、本申请通过下述技术方案实现:
3、一种悬挂式轨道巡检机器人,包括机器人本体,所述机器人本体包括机身、横向行走机构、升降运动机构、位置监测模块、检测组件和控制模块,横向行走机构包括驱动轮、导向轮组和横行电机,驱动轮用于紧贴导轨,导向轮组用于支撑在轨道上,横行电机与驱动轮连接用于带动驱动轮旋转;升降运动机构包括伸缩臂和升降电机,伸缩臂上端与机身连接,升降电机与伸缩臂连接用于带动伸缩臂进行伸缩运动;位置监测模块用于监测机器人本体的位置,检测组件包括摄像机和云台,云台与伸缩臂的下端连接,摄像机装于云台上;所述横向行走机构、升降运动机构、位置监测模块和检测组件均与控制模块连接。
4、可选的,所述检测组件还包括红外热像仪、烟雾报警传感器、场强检测仪、紫外检测仪中的至少一个。
5、其中,一种悬挂式轨道巡检机器人还包括轨道系统,轨道系统包括轨道,所述驱动轮紧贴轨道的外侧面,导向轮组支承在轨道上。
6、可选的,所述轨道为开口朝下的c型轨道,c型轨道内部两侧有与导向轮适配的轮槽,导向轮组安装在轨道内侧的轮槽中。
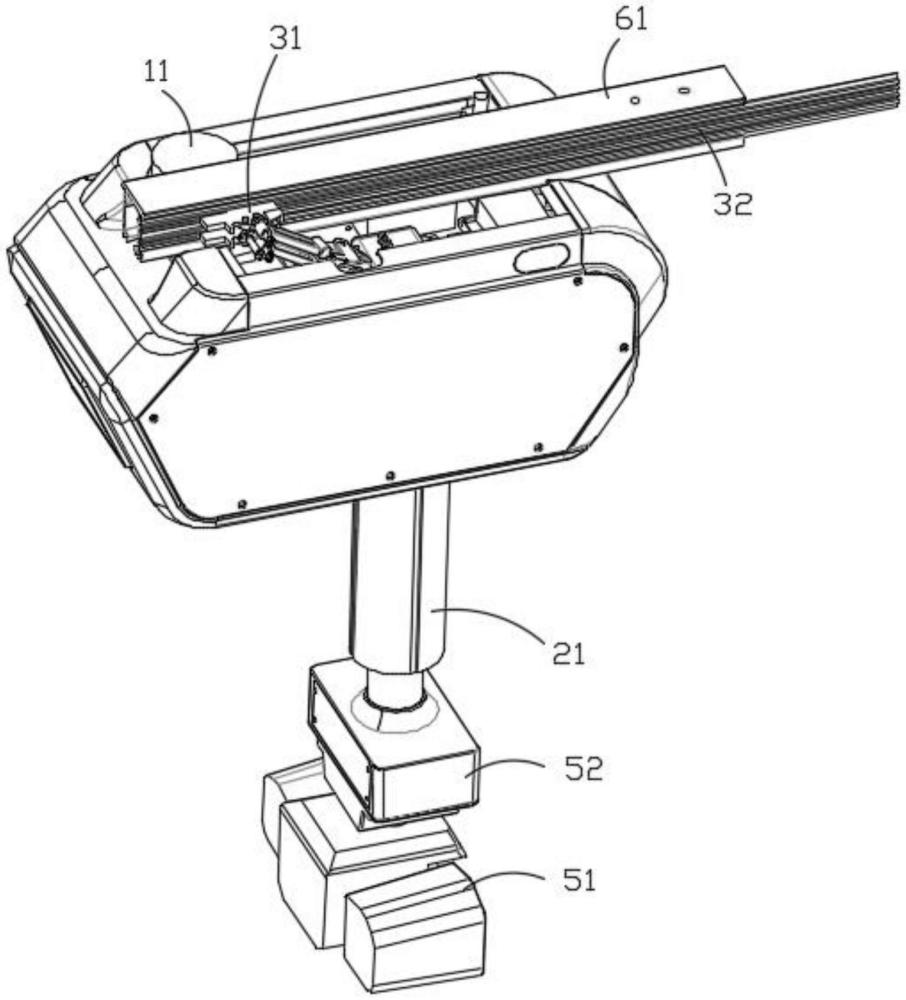
7、可选的,一种悬挂式轨道巡检机器人还包括集电装置,所述集电装置包括滑触线和一组电刷头,所述滑触线安装在轨道的外侧面,所述一组电刷头与机器人本体连接;所述一组电刷头可操作地与滑触线接触。
8、可选的,所述位置监测模块包括前激光测距传感器、侧面激光测距传感器和升降激光测距传感器。
9、可选的,所述摄像机为高清工业级红外双目摄像机。
10、与现有技术相比,本申请具有以下有益效果:
11、通过安装吊顶轨道,将机器人本体挂在轨道上,可实现无障碍行走,从而定点对变电设备的元件进行功能巡检,其可代替人工巡检,大幅降低了运行人员的劳动强度,提升了巡检效率和巡检质量。
技术特征:
1.一种悬挂式轨道巡检机器人,包括机器人本体,其特征在于:所述机器人本体包括:
2.根据权利要求1所述的一种悬挂式轨道巡检机器人,其特征在于:所述检测组件还包括红外热像仪、烟雾报警传感器、场强检测仪、紫外检测仪中的至少一个。
3.根据权利要求1所述的一种悬挂式轨道巡检机器人,其特征在于:还包括轨道系统,轨道系统包括轨道(61),所述驱动轮(11)紧贴轨道(61)的外侧面,导向轮组(12)支承在轨道(61)上。
4.根据权利要求1所述的一种悬挂式轨道巡检机器人,其特征在于:所述轨道(61)为开口朝下的c型轨道,c型轨道内部两侧有与导向轮适配的轮槽,导向轮组(12)安装在轨道(61)内侧的轮槽中。
5.根据权利要求3或4所述的一种悬挂式轨道巡检机器人,其特征在于:还包括集电装置(3),所述集电装置(3)包括滑触线(32)和一组电刷头(31),所述滑触线(32)安装在轨道(61)的外侧面,所述一组电刷头(31)与机器人本体连接;
6.根据权利要求1所述的一种悬挂式轨道巡检机器人,其特征在于:所述控制模块采用可编程逻辑控制器。
7.根据权利要求1所述的一种悬挂式轨道巡检机器人,其特征在于:所述位置监测模块包括前激光测距传感器(41)、侧面激光测距传感器(42)和升降激光测距传感器(43)。
8.根据权利要求1所述的一种悬挂式轨道巡检机器人,其特征在于:所述摄像机(51)为高清工业级红外双目摄像机。
9.根据权利要求1所述的一种悬挂式轨道巡检机器人,其特征在于:导向轮组(12)沿纵向设有4个,每组有左右两个导向轮。
10.根据权利要求1所述的一种悬挂式轨道巡检机器人,其特征在于:横行电机(13)为直流电机。
技术总结
本技术涉及一种悬挂式轨道巡检机器人,包括机器人本体和轨道系统,机器人本体包括机身、横向行走机构、升降运动机构、位置监测模块、检测组件和控制模块,横向行走机构包括驱动轮、导向轮组和横行电机,驱动轮紧贴导轨,导向轮组支撑在轨道上,横行电机与驱动轮连接;升降运动机构包括伸缩臂和升降电机,检测组件包括摄像机和云台,云台与伸缩臂的下端连接,摄像机装于云台上;横向行走机构、升降运动机构、位置监测模块和检测组件均与控制模块连接。本申请将机器人本体挂在轨道上,可实现无障碍行走,从而定点对变电设备的元件进行功能巡检,其可代替人工巡检,大幅降低了运行人员的劳动强度,提升了巡检效率和巡检质量。
技术研发人员:王安民,赵焜,刘志焱,陈春生,蒋迪楠,张乾晓,武喜龙,魏涛
受保护的技术使用者:白银银珠电力(集团)有限责任公司
技术研发日:20230717
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!