用于矿用检修平台的机械手臂及检修机器人的制作方法
本技术属于煤矿装置领域,特别是指一种用于矿用检修平台的机械手臂及检修机器人。
背景技术:
1、目前,煤矿立井多通过多绳摩擦式绞车,采用罐笼提升人员及物料。为了节能和降低绞车提升负荷,使两侧提升的质量相近,两侧的罐笼下方挂设有尾绳。因长期受到高强度的使用、锈蚀和磨损,尾绳需要每天进行检修以保证使用安全,并每隔一两年进行更换。
2、现有技术中,尾绳的检修和更换都是在下井口利用井筒内的横梁搭设跳板,人员站在跳板上进行。如果发现问题,检修人员只能利用横梁爬上爬下进行常规的、简单的处理。这种较为原始、传统的工作方式不仅检修时间长、效率低,而且检修人员的安全得不到保障,检修过程中潜在的不安全因素可能会对检修人员造成伤害。如果将尾绳检修和更换工作由人力进行改变为人力远程操作机械手进行,不仅可以改善人工作业环境,提高工作效率,还能增加检修时的安全性。为此,提出本申请。
技术实现思路
1、为解决以上现有技术的不足,本实用新型提出了一种用于矿用检修平台的机械手臂。
2、本实用新型的技术方案是这样实现的:
3、一种用于矿用检修平台的机械手臂,包括:可水平旋转任意角度的转动机构、大臂、中间臂、小臂、旋转机构和操作结构,大臂纵向设置且底端固定于转动机构上、顶端与横向设置的中间臂的一端铰接,中间臂的另一端与小臂铰接,小臂上连接有相对于小臂可左右摆动的旋转机构,旋转机构与小臂同轴设置且相对于该轴可旋转任意角度,操作结构固定于旋转机构上,小臂与中间臂之间设置有用于调节小臂与中间臂之间夹角的第一变幅结构,大臂与中间臂之间设置有用于调节大臂与中间臂之间夹角的第二变幅结构。
4、优选的,操作结构包括:夹爪、吊钩、尾绳驱动机和钢丝绳驱动机中的至少一种。
5、进一步优选的,还包括连接件,连接件一端与旋转机构固定、另一端与小臂可伸缩连接,连接件上设置有摆动连接耳,小臂上设置有小臂连接耳,摆动连接耳与小臂连接耳之间设置有可左右摆动的摆动机构。
6、进一步优选的,小臂包括呈一夹角连接的小臂第一关节和小臂第二关节,小臂第一关节和小臂第二关节的连接处与中间臂的一端铰接,第一变幅结构设置于中间臂上且作用于小臂第二关节的自由端。
7、进一步优选的,中间臂下方设置有中间臂连接耳,大臂的底部设置有大臂连接耳,第二变幅结构设置于大臂连接耳上且作用于中间臂连接耳。
8、进一步优选的,尾绳驱动机为尾绳驱动链式板,钢丝绳驱动机为钢丝绳驱动链式板,尾绳驱动链式板和钢丝绳驱动链式板上设置有压紧机构。
9、进一步优选的,旋转机构、压紧机构、摆动机构、第一变幅结构和第二变幅结构均为油缸。
10、更为优选的,小臂第一关节的长度大于小臂第二关节,小臂第一关节和小臂第二关节之间的夹角为一开口朝下的钝角。
11、最为优选的,转动机构为液压驱动的转盘,转盘底部固定有安装座。
12、一种检修机器人,包括用于矿用检修平台的机械手臂。
13、与现有技术相比,本实用新型可以将尾绳检修和更换工作由人力进行改变为人力远程操作机械手进行,不仅能有效改善人工作业环境,提高工作效率,还能增加检修时的安全性。
技术特征:
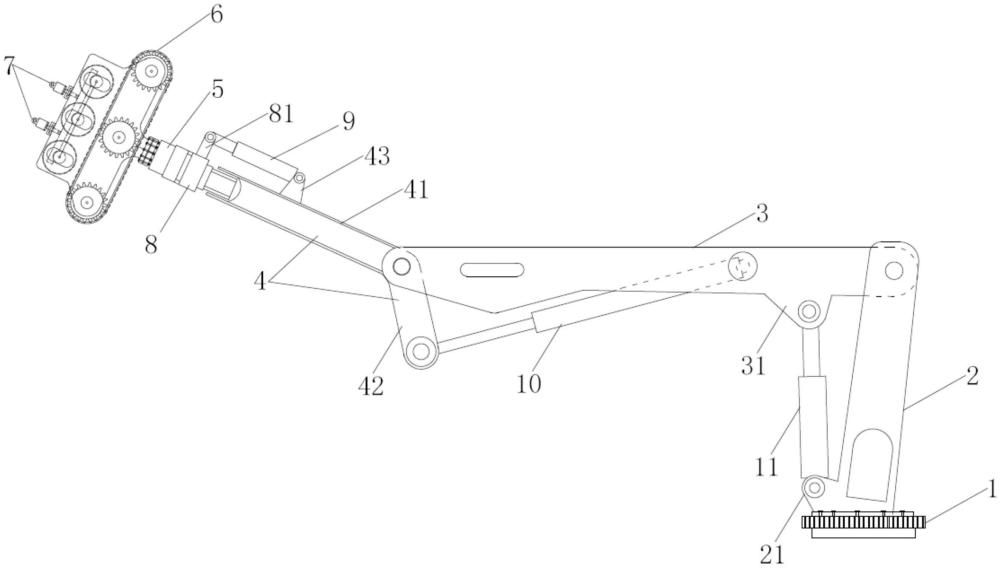
1.用于矿用检修平台的机械手臂,其特征在于:包括:可水平旋转任意角度的转动机构、大臂(2)、中间臂(3)、小臂(4)、旋转机构(5)和操作结构,大臂(2)纵向设置且底端固定于所述转动机构上、顶端与横向设置的中间臂(3)的一端铰接,中间臂(3)的另一端与小臂(4)铰接,小臂(4)上连接有相对于小臂(4)可左右摆动的旋转机构(5),旋转机构(5)与小臂(4)同轴设置且相对于该轴可旋转任意角度,所述操作结构固定于旋转机构(5)上,小臂(4)与中间臂(3)之间设置有用于调节小臂(4)与中间臂(3)之间夹角的第一变幅结构(10),大臂(2)与中间臂(3)之间设置有用于调节大臂(2)与中间臂(3)之间夹角的第二变幅结构(11)。
2.根据权利要求1所述的用于矿用检修平台的机械手臂,其特征在于:所述操作结构包括:夹爪、吊钩、尾绳驱动机和钢丝绳驱动机中的至少一种。
3.根据权利要求2所述的用于矿用检修平台的机械手臂,其特征在于:还包括连接件(8),连接件(8)一端与旋转机构(5)固定、另一端与小臂(4)可伸缩连接,连接件(8)上设置有摆动连接耳(81),小臂(4)上设置有小臂连接耳(43),摆动连接耳(81)与小臂连接耳(43)之间设置有可左右摆动的摆动机构(9)。
4.根据权利要求3所述的用于矿用检修平台的机械手臂,其特征在于:小臂(4)包括呈一夹角连接的小臂第一关节(41)和小臂第二关节(42),小臂第一关节(41)和小臂第二关节(42)的连接处与中间臂(3)的一端铰接,第一变幅结构(10)设置于中间臂(3)上且作用于小臂第二关节(42)的自由端。
5.根据权利要求4所述的用于矿用检修平台的机械手臂,其特征在于:中间臂(3)下方设置有中间臂连接耳(31),大臂(2)的底部设置有大臂连接耳(21),第二变幅结构(11)设置于大臂连接耳(21)上且作用于中间臂连接耳(31)。
6.根据权利要求2所述的用于矿用检修平台的机械手臂,其特征在于:所述尾绳驱动机为尾绳驱动链式板(6),所述钢丝绳驱动机为钢丝绳驱动链式板,所述尾绳驱动链式板(6)和所述钢丝绳驱动链式板上设置有压紧机构(7)。
7.根据权利要求3所述的用于矿用检修平台的机械手臂,其特征在于:旋转机构(5)、压紧机构(7)、摆动机构(9)、第一变幅结构(10)和第二变幅结构(11)均为油缸。
8.根据权利要求4所述的用于矿用检修平台的机械手臂,其特征在于:小臂第一关节(41)的长度大于小臂第二关节(42),小臂第一关节(41)和小臂第二关节(42)之间的夹角为一开口朝下的钝角。
9.根据权利要求1-8任一项所述的用于矿用检修平台的机械手臂,其特征在于:所述转动机构为液压驱动的转盘(1),转盘(1)底部固定有安装座。
10.一种检修机器人,其特征在于:包括如权利要求1-8任一项所述的用于矿用检修平台的机械手臂。
技术总结
本技术属于煤矿装置领域,具体公开了一种用于矿用检修平台的机械手臂及检修机器人,该机械手臂包括:转动机构、大臂、中间臂、小臂、旋转机构和操作结构,大臂纵向设置且底端固定于转动机构上、顶端与横向设置的中间臂的一端铰接,中间臂的另一端与小臂铰接,小臂上设置有相对于小臂可左右摆动的旋转机构,旋转机构与小臂同轴设置且相对于该轴可转动,操作结构固定于旋转机构上,小臂与中间臂之间设置有第一变幅结构,大臂与中间臂之间设置有第二变幅结构;该检修机器人,设置有该机械手臂。本技术可以代替检修人员进入井下进行检修工作,既有助于提高工作效率,又能避免人工作业的危险。
技术研发人员:杜向阳,张丽峰,张健,杨忠,何涛,范红魁,郑继权,张昊,黄晓阳,张斌
受保护的技术使用者:山西潞安环保能源开发股份有限公司五阳煤矿
技术研发日:20230717
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!