一种带同吸同夹结构的机械手的制作方法
本申请属于镜片生产,具体涉及一种带同吸同夹结构的机械手。
背景技术:
1、在镜片加工中,常用上下模配合限高套成型镜片,现有的自动机械手夹取机构,其在限高套及下模上放置镜片后,通过夹取机构放置上模在限高套上端面,如专利号为cn211363119u中所述,如图1所示,现有机械手1常仅使用夹取机2构夹持上模具,夹取机构2在夹取上模具的过程中,与上模具之间的平面精度无法保证,上模具有从夹取机构掉落的风险,进而降低生产效率,和生产安全性,现急需作出改进。
技术实现思路
1、本申请为了解决现有镜片加工工艺中,用于夹持上模具的夹取机构与上模具之间精度无法保证,夹取稳定性较低,上模具夹取不稳定的技术稳定,提出一种带同吸同夹结构的机械手。
2、本申请采用如下方案,一种带同吸同夹结构的机械手,包括机械手主体,设于所述机械手主体上的夹取机构,以及设于所述机械手主体和所述夹取机构之间的吸取机构,所述夹取机构用于夹取上模具,当所述夹取机构夹取上模具时,所述吸取机构与上模具贴合,以吸附上模具。
3、优选的,所述吸取机构包括设于所述吸取机构与所述机械手主体之间的第一连接组件,以及设于所述第一连接组件上的真空吸盘,所述第一连接组件用于将所述真空吸盘可拆卸连接于所述机械手主体上。
4、优选的,所述第一连接组件包括设于所述真空吸盘与所述机械手主体之间的第一连接槽,以及设于所述真空吸盘上位于所述第一连接槽对应位置处的连接凸沿,所述连接凸沿可匹配伸入所述第一连接槽内。
5、优选的,所述夹取机构包括设于所述夹取机构上的夹爪,设于所述夹爪与所述机械手主体之间的第二连接组件,以及设于所述夹爪与所述机械手主体之间的固定组件,所述第二连接组件用于将所述夹取机构可拆卸连接于所述机械手主体上,所述固定组件用于将所述夹爪固定于所述机械手主体上。
6、优选的,所述第二连接组件包括设于所述夹爪与所述机械手主体之间的第二连接槽,以及设于所述第二连接槽对应位置处的连接凸起,所述连接凸起可匹配嵌合于所述第二连接槽内。
7、优选的,所述夹爪设有多个,所述吸取机构位于多个所述夹爪之间,多个所述夹爪绕所述机械手主体边缘设置,且可沿所述机械手主体径向移动,当多个所述夹爪共同与上模具相抵时,所述吸取机构吸附上模具。
8、优选的,所述夹爪包括主板以及设于所述主板上的凸板,所述凸板,多个所述凸板的侧面共同与上模具外表面相抵,以夹取上模具。
9、优选的,所述固定组件包括设于所述夹爪与所述机械手主体之间上的外固定孔,设于所述外固定孔对应位置处,可与所述外固定孔连通的内固定孔,以及设于所述外固定孔上紧固件,当所述外固定孔与所述内固定孔连通时,所述紧固件由所述外固定孔穿设至所述内固定孔内。
10、优选的,所述夹取机构还包括与所述夹爪连接的驱动件,所述驱动件用于驱动多个所述夹爪同时沿所述第二连接槽方向移动。
11、优选的,所述机械手主体上设有与所述夹取机构和吸取机构连接的保压机构,所述保压机构用于维持所述夹取机构和所述吸取机构的工作气压。
12、与现有技术相比,本申请具有以下有益效果
13、本申请提供一种带同吸同夹结构的机械手,包括机械手主体,夹取机构,吸取机构,通过在机械手主体与吸取机构之间设置负压吸取机构,当夹取机构夹持上模具时,吸取机构与吸取上模具,与上模具表面贴合,解决了现有的夹取机构与上模贴合精密度低,夹取机构夹持上模具稳定性低,上模具容易掉落的问题,具有改进简单,改进成本低,便于推广实施的优点。
技术特征:
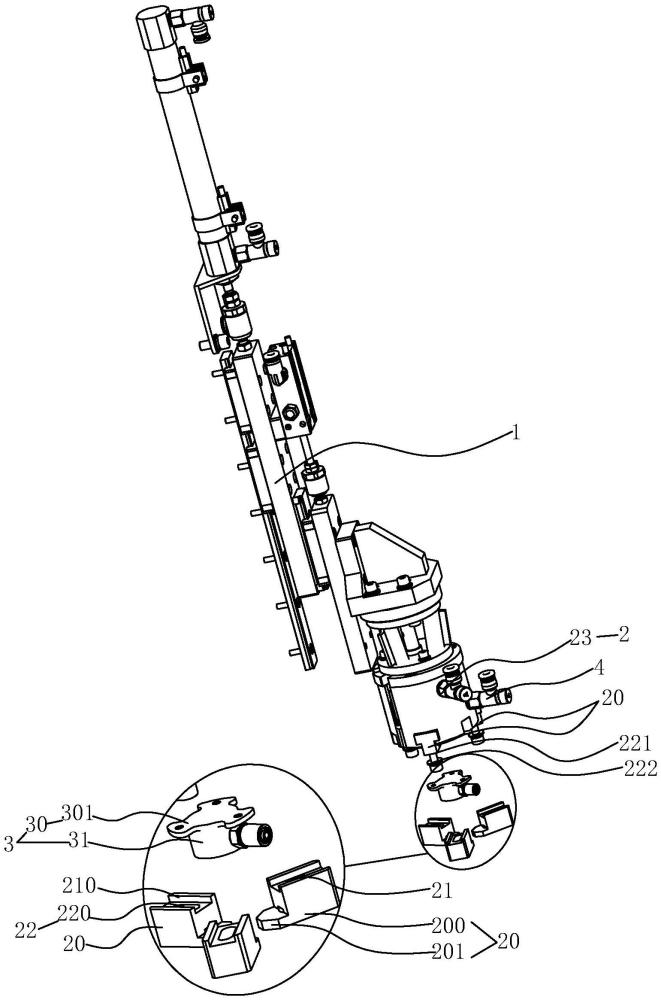
1.一种带同吸同夹结构的机械手,其特征在于,包括机械手主体(1),设于所述机械手主体(1)上的夹取机构(2),以及设于所述机械手主体(1)和所述夹取机构(2)之间的吸取机构(3),所述夹取机构(2)用于夹取上模具,当所述夹取机构(2)夹取上模具时,所述吸取机构(3)与上模具贴合,以吸附上模具。
2.根据权利要求1所述的带同吸同夹结构的机械手,其特征在于,所述吸取机构(3)包括设于所述吸取机构(3)与所述机械手主体(1)之间的第一连接组件(30),以及设于所述第一连接组件(30)上的真空吸盘(31),所述第一连接组件(30)用于将所述真空吸盘(31)可拆卸连接于所述机械手主体(1)上。
3.根据权利要求2所述的带同吸同夹结构的机械手,其特征在于,所述第一连接组件(30)包括设于所述真空吸盘(31)与所述机械手主体(1)之间的第一连接槽(300),以及设于所述真空吸盘(31)上位于所述第一连接槽(300)对应位置处的连接凸沿(301),所述连接凸沿(301)可匹配伸入所述第一连接槽(300)内。
4.根据权利要求1所述的带同吸同夹结构的机械手,其特征在于,所述夹取机构(2)包括设于所述夹取机构(2)上的夹爪(20),设于所述夹爪(20)与所述机械手主体(1)之间的第二连接组件(21),以及设于所述夹爪(20)与所述机械手主体(1)之间的固定组件(22),所述第二连接组件(21)用于将所述夹取机构(2)可拆卸连接于所述机械手主体(1)上,所述固定组件(22)用于将所述夹爪(20)固定于所述机械手主体(1)上。
5.根据权利要求4所述的带同吸同夹结构的机械手,其特征在于,所述第二连接组件(21)包括设于所述夹爪(20)与所述机械手主体(1)之间的第二连接槽(210),以及设于所述第二连接槽(210)对应位置处的连接凸起(211),所述连接凸起(211)可匹配嵌合于所述第二连接槽(210)内。
6.根据权利要求4所述的带同吸同夹结构的机械手,其特征在于,所述夹爪(20)设有多个,所述吸取机构(3)位于多个所述夹爪(20)之间,多个所述夹爪(20)绕所述机械手主体(1)边缘设置,且可沿所述机械手主体(1)径向移动,当多个所述夹爪(20)共同与上模具相抵时,所述吸取机构(3)吸附上模具。
7.根据权利要求4所述的带同吸同夹结构的机械手,其特征在于,所述夹爪(20)包括主板(200)以及设于所述主板(200)上的凸板(201),所述凸板(201),多个所述凸板(201)的侧面共同与上模具外表面相抵,以夹取上模具。
8.根据权利要求4所述的带同吸同夹结构的机械手,其特征在于,所述固定组件(22)包括设于所述夹爪(20)与所述机械手主体(1)之间上的外固定孔(220),设于所述外固定孔(220)对应位置处,可与所述外固定孔(220)连通的内固定孔(221),以及设于所述外固定孔(220)上紧固件(222),当所述外固定孔(220)与所述内固定孔(221)连通时,所述紧固件(222)由所述外固定孔(220)穿设至所述内固定孔(221)内。
9.根据权利要求5所述的带同吸同夹结构的机械手,其特征在于,所述夹取机构(2)还包括与所述夹爪(20)连接的驱动件(23),所述驱动件(23)用于驱动多个所述夹爪(20)同时沿所述第二连接槽(210)方向移动。
10.根据权利要求1所述的带同吸同夹结构的机械手,其特征在于,所述机械手主体(1)上设有与所述夹取机构(2)和吸取机构(3)连接的保压机构(4),所述保压机构(4)用于维持所述夹取机构(2)和所述吸取机构(3)的工作气压。
技术总结
本申请提供一种带同吸同夹结构的机械手,包括机械手主体,夹取机构,吸取机构,通过在机械手主体与吸取机构之间设置负压吸取机构,当夹取机构夹持上模具时,吸取机构与吸取上模具,与上模具表面贴合,解决了现有的夹取机构与上模贴合精密度低,夹取机构夹持上模具稳定性低,上模具容易掉落的问题,具有改进简单,改进成本低,便于推广实施的优点。
技术研发人员:杜肖剑,陈永俊
受保护的技术使用者:广东金鼎光学技术股份有限公司
技术研发日:20230720
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!