一种灌浆套筒抓取的机械手的制作方法
本技术涉及灌浆套筒,具体为一种灌浆套筒抓取的机械手。
背景技术:
1、灌浆套筒又称灌浆套筒接头或套筒灌浆接头,灌浆套筒是由专门加工的套筒、配套灌浆料和钢筋组装的组合体,在连接钢筋时通过注入快硬无收缩灌浆料,依靠材料之间的黏结咬合作用连接钢筋与套筒。套筒灌浆接头具有性能可靠、适用性广、安装简便等优点。
2、现有的灌浆套筒抓取的机械手,传统的采用上下夹持固定将灌浆套筒进行拿取,但是只能实现上下口径相同的灌浆套筒,当试件外径不同时就难以进行夹持抓取,导致机械手的夹取效率低下,不能满足生产需求,故而提出一种灌浆套筒抓取的机械手来解决上述中所提出的问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种灌浆套筒抓取的机械手,具备不同外径的灌浆套筒夹取等优点,解决了传统的采用上下夹持固定将灌浆套筒进行拿取,但是只能实现上下口径相同的灌浆套筒,当试件外径不同时就难以进行夹持抓取,导致机械手的夹取效率低下的问题。
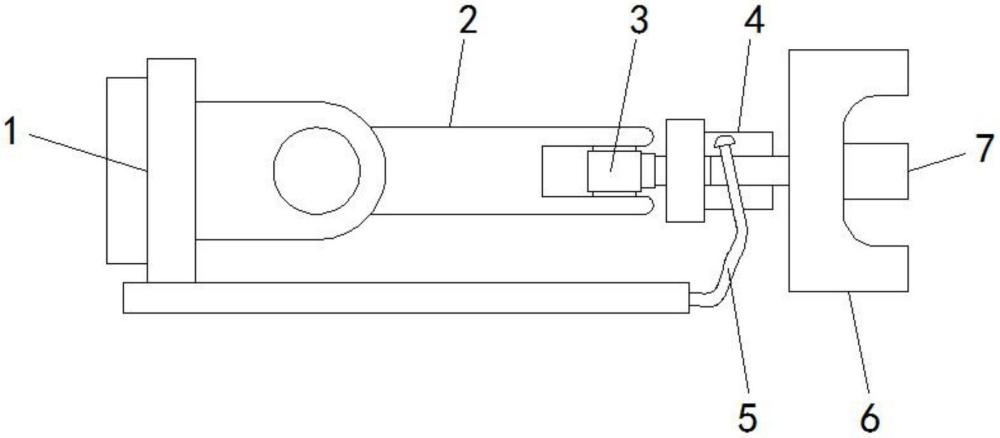
2、为实现上述不同外径的灌浆套筒夹取目的,本实用新型提供如下技术方案:一种灌浆套筒抓取的机械手,包括载体,所述载体右侧的内部转动连接有第一连接活动杆,所述第一连接活动杆右侧的内部转动连接有第二连接活动杆,所述第二连接活动杆右侧转动连接有第三连接活动杆,所述第三连接活动杆表面一体连接有线路,所述第三连接活动杆右侧固定连接有抓取组件。
3、所述抓取组件包括固定架,所述固定架内侧分别固定连接有两个第一定位板和第二定位板,所述第一定位板和第二定位板上侧表面均固定安装有电动伸缩杆,所述电动伸缩杆左侧固定连接有第二螺纹块,所述电动伸缩杆伸缩端固定连接有连接块,所述连接块靠近电动伸缩杆伸缩端端的相邻侧面均转动连接有两个第二连杆,所述第二连杆外侧的中部转动连接有第一连杆,所述第二连杆远离连接块的一侧分别转动连接有第一夹取手和第二夹取手。
4、进一步,所述固定架内壁固定连接有驱动组件,所述驱动组件包括两个挡板,两个所述挡板相背一侧均固定安装有第二驱动电机,所述第二驱动电机的输出轴表面螺纹连接有第二螺纹块,所述挡板一侧面固定安装有第一驱动电机,所述第一驱动电机输出端连接有螺纹杆,所述螺纹杆外侧螺纹连接有第一螺纹块。
5、进一步,所述第一连接活动杆在载体右侧呈上下圆周运动,所述第二连接活动杆在第一连接活动杆右侧呈左右圆周运动。
6、进一步,所述第三连接活动杆表面的线路输出端分别与第一连接活动杆、第二连接活动杆、第三连接活动杆、电动伸缩杆输出端相互电性连接。
7、进一步,两个所述第一夹取手在固定架内侧的上下两端平行排列,所述第二夹取手活动连接在两个第一夹取手之间。
8、进一步,所述第一夹取手和第二夹取手远离第二连杆的一端面粘接有防滑垫,所述防滑垫为橡胶垫片。
9、进一步,所述固定架表面开设有滑槽,所述第一螺纹块一侧与第二定位板一侧焊接固定。
10、与现有技术相比,本实用新型提供了一种灌浆套筒抓取的机械手,具备以下有益效果:
11、1、该灌浆套筒抓取的机械手,通过第一定位板和表面电动伸缩杆伸缩端带动实现两个第一夹取手和第二夹取手均对灌浆套筒上下两侧和中侧实现夹取,而第一夹取手和第二夹取手相互错开夹取实现对不同外径的套筒同步实现抓取,提高了抓取效率。
12、2、该灌浆套筒抓取的机械手,通过第一驱动电机驱动螺纹杆外侧第一螺纹块螺纹转动并在固定架表面上下直线位移能实现不同长度的套筒外径实现抓取,解决了传统的采用上下夹持固定将灌浆套筒进行拿取,但是只能实现上下口径相同的灌浆套筒,当试件外径不同时就难以进行夹持抓取,导致机械手的夹取效率低下的问题。
技术特征:
1.一种灌浆套筒抓取的机械手,包括载体(1),其特征在于:所述载体(1)右侧的内部转动连接有第一连接活动杆(2),所述第一连接活动杆(2)右侧的内部转动连接有第二连接活动杆(3),所述第二连接活动杆(3)右侧转动连接有第三连接活动杆(4),所述第三连接活动杆(4)表面一体连接有线路(5),所述第三连接活动杆(4)右侧固定连接有抓取组件;
2.根据权利要求1所述的一种灌浆套筒抓取的机械手,其特征在于:所述固定架(6)内壁固定连接有驱动组件,所述驱动组件包括两个挡板(16),两个所述挡板(16)相背一侧均固定安装有第二驱动电机(22),所述第二驱动电机(22)的输出轴表面螺纹连接有第二螺纹块(21),所述挡板(16)一侧面固定安装有第一驱动电机(17),所述第一驱动电机(17)输出端连接有螺纹杆(18),所述螺纹杆(18)外侧螺纹连接有第一螺纹块(19)。
3.根据权利要求1所述的一种灌浆套筒抓取的机械手,其特征在于:所述第一连接活动杆(2)在载体(1)右侧呈上下圆周运动,所述第二连接活动杆(3)在第一连接活动杆(2)右侧呈左右圆周运动。
4.根据权利要求3所述的一种灌浆套筒抓取的机械手,其特征在于:所述第三连接活动杆(4)表面的线路(5)输出端分别与第一连接活动杆(2)、第二连接活动杆(3)、第三连接活动杆(4)、电动伸缩杆(9)输出端相互电性连接。
5.根据权利要求2所述的一种灌浆套筒抓取的机械手,其特征在于:两个所述第一夹取手(13)在固定架(6)内侧的上下两端平行排列,所述第二夹取手(7)活动连接在两个第一夹取手(13)之间。
6.根据权利要求5所述的一种灌浆套筒抓取的机械手,其特征在于:所述第一夹取手(13)和第二夹取手(7)远离第二连杆(12)的一端面粘接有防滑垫(14),所述防滑垫(14)为橡胶垫片。
7.根据权利要求5所述的一种灌浆套筒抓取的机械手,其特征在于:所述固定架(6)表面开设有滑槽(15),所述第一螺纹块(19)一侧与第二定位板(20)一侧焊接固定。
技术总结
本技术涉及一种灌浆套筒抓取的机械手,包括载体,所述载体右侧的内部转动连接有第一连接活动杆,所述第一连接活动杆右侧的内部转动连接有第二连接活动杆,所述第二连接活动杆右侧转动连接有第三连接活动杆,所述第三连接活动杆表面一体连接有线路,所述第三连接活动杆右侧固定连接有抓取组件;所述抓取组件包括固定架,所述固定架内侧分别固定连接有两个第一定位板和第二定位板。该灌浆套筒抓取的机械手,通过第一定位板和表面电动伸缩杆伸缩端带动实现两个第一夹取手和第二夹取手均对灌浆套筒上下两侧和中侧实现夹取,而第一夹取手和第二夹取手相互错开夹取实现对不同外径的套筒同步实现抓取,提高了抓取效率。
技术研发人员:熊萍,胡安,曹明旺,莫荣清,陈浩,侯淑芬,邹莉
受保护的技术使用者:武汉市中心工程检测有限公司
技术研发日:20230725
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!