机械手支撑臂的快换装置的制作方法
本技术属于机械手,特别是涉及机械手支撑臂的快换装置。
背景技术:
1、机械手,指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置,其主要由执行机构、驱动机构和控制系统三大部分组成。它可代替人进行繁重劳动以实现生产的机械化和自动化,广泛应用于机械制造、轻工和原子能等部门。
2、随着对商品的加工需要,需要将机械手进行更换,进而与加工商品匹配。但是现有的机械手在进行更换的时候,由于机械手与机械臂之间的连接多为螺栓固定,进而在对其进行拆卸的时候,不能快速的进行拆卸,进而造化拆卸时间增大,降低工作效率。故此,我们提出机械手支撑臂的快换装置。
技术实现思路
1、本实用新型的目的在于提供机械手支撑臂的快换装置,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型采取的技术方案为:
3、本实用新型为机械手支撑臂的快换装置,包括安装杆和机械臂,所述安装杆外表面安装有安装卡块,所述机械臂外表面安装有连接卡块,所述安装卡块与连接卡块内表面均设置有卡槽,所述安装卡块与连接卡块通过卡槽进行互相连接,所述安装杆内表面设置有安装槽,所述安装槽内表面安装有安装座,所述安装座外表面安装有安装箱,所述安装箱内表面安装有气缸,所述气缸输出端安装有定位套筒,所述安装卡块与连接卡块内表面均设置有定位槽,所述定位套筒外表面嵌合在定位槽内表面,首先将安装卡块与连接卡块通过卡槽进行互相连接,然后通过安装螺栓将安装箱固定在安装座外表面,然后将气缸安装在安装箱内部,然后通过箱盖的安装,从而将气缸安装在安装箱内部,然后利用限位块外表面与限位槽内表面之间的连接,从而将定位套筒安装在气缸输出端外表面,然后通过控制气缸,推动定位套筒移动,使定位套筒外表面嵌合在安装卡块与连接卡块内部设置的定位槽内表面,从而能够减少更换机械手所需时间,从而方便对机械手进行快速更换,从而能够提高更换机械手的工作效率。
4、优选地,所述安装箱内表面安装有若干安装螺栓,所述安装箱通过安装螺栓安装安装座外表面。
5、优选地,所述安装箱外表面安装有箱盖,所述箱盖内表面安装有若干定位螺栓,所述箱盖通过定位螺栓安装在安装箱外表面。
6、优选地,所述气缸输出端外表面安装有限位块,所述定位套筒内表面设置有限位槽,所述限位块外表面嵌合在限位槽内表面,通过限位块的安装,以及限位槽的设置,利用限位块外表面与限位槽内表面之间的连接,从而方便将定位套筒安装在气缸输出端外表面。
7、本实用新型具有以下有益效果:
8、1.本实用新型中,首先将安装卡块与连接卡块通过卡槽进行互相连接,然后通过安装螺栓将安装箱固定在安装座外表面,然后将气缸安装在安装箱内部,然后通过箱盖的安装,从而将气缸安装在安装箱内部,然后利用限位块外表面与限位槽内表面之间的连接,从而将定位套筒安装在气缸输出端外表面,然后通过控制气缸,推动定位套筒移动,使定位套筒外表面嵌合在安装卡块与连接卡块内部设置的定位槽内表面,从而能够减少更换机械手所需时间,从而方便对机械手进行快速更换,从而能够提高更换机械手的工作效率。
技术特征:
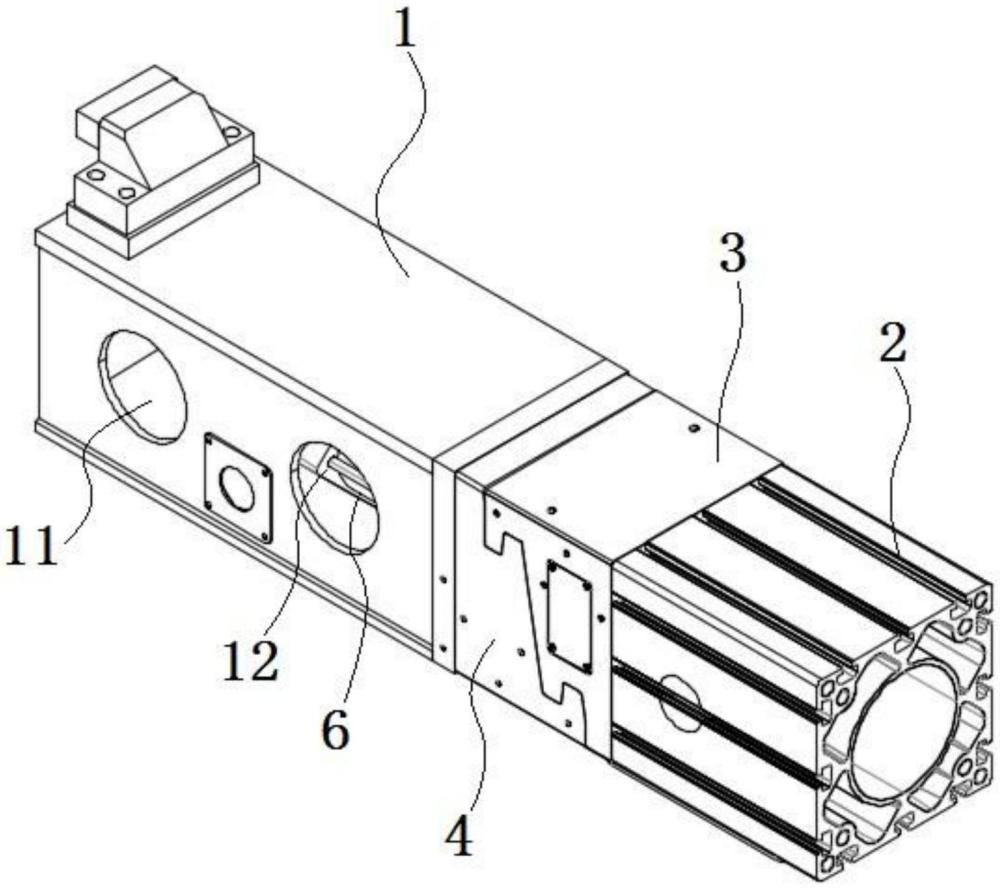
1.机械手支撑臂的快换装置,包括安装杆(1)和机械臂(2),其特征在于:所述安装杆(1)外表面安装有安装卡块(4),所述机械臂(2)外表面安装有连接卡块(3),所述安装卡块(4)与连接卡块(3)内表面均设置有卡槽(5),所述安装卡块(4)与连接卡块(3)通过卡槽(5)进行互相连接,所述安装杆(1)内表面设置有安装槽(11),所述安装槽(11)内表面安装有安装座(16),所述安装座(16)外表面安装有安装箱(6),所述安装箱(6)内表面安装有气缸(7),所述气缸(7)输出端安装有定位套筒(8),所述安装卡块(4)与连接卡块(3)内表面均设置有定位槽(9),所述定位套筒(8)外表面嵌合在定位槽(9)内表面。
2.根据权利要求1所述的机械手支撑臂的快换装置,其特征在于:所述安装箱(6)内表面安装有若干安装螺栓(10),所述安装箱(6)通过安装螺栓(10)安装安装座(16)外表面。
3.根据权利要求1所述的机械手支撑臂的快换装置,其特征在于:所述安装箱(6)外表面安装有箱盖(12),所述箱盖(12)内表面安装有若干定位螺栓(13)。
4.根据权利要求3所述的机械手支撑臂的快换装置,其特征在于:所述箱盖(12)通过定位螺栓(13)安装在安装箱(6)外表面。
5.根据权利要求1所述的机械手支撑臂的快换装置,其特征在于:所述气缸(7)输出端外表面安装有限位块(15),所述定位套筒(8)内表面设置有限位槽(14)。
6.根据权利要求5所述的机械手支撑臂的快换装置,其特征在于:所述限位块(15)外表面嵌合在限位槽(14)内表面。
技术总结
本技术公开了机械手支撑臂的快换装置,包括机械臂,安装杆外表面安装有安装卡块,机械臂外表面安装有连接卡块,安装卡块与连接卡块内表面均设置有卡槽,安装卡块与连接卡块通过卡槽进行互相连接,安装箱内表面安装有气缸,气缸输出端安装有定位套筒。本技术所述的机械手支撑臂的快换装置,首先将安装卡块与连接卡块通过卡槽进行互相连接,然后利用限位块外表面与限位槽内表面之间的连接,从而将定位套筒安装在气缸输出端外表面,然后通过控制气缸,推动定位套筒移动,使定位套筒外表面嵌合在安装卡块与连接卡块内部设置的定位槽内表面,从而能够减少更换机械手所需时间,从而方便对机械手进行快速更换,从而能够提高更换机械手的工作效率。
技术研发人员:缪栋,郭加朋,冯超
受保护的技术使用者:昆山奥尔顿自动化科技有限公司
技术研发日:20230726
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!