一种可方便更换的机器人末端夹具
本技术涉及夹具,具体为一种可方便更换的机器人末端夹具。
背景技术:
1、在工业生产中,机器人越来越多地用来取代工人从事恶劣环境、劳动强度大、高危险性、重复性大的作业,例如钣金折弯或搬运等作业。
2、像这样一些作业,需根据作业内容的不同需要换装夹具。
3、现有技术中,机器人换装不同形状的夹具的时候大多是操作人员利用螺钉将新的夹具固定的机器臂上,这种操作方法费时费力,降低了工厂自动化生产的效率。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种可方便更换的机器人末端夹具,解决了操作人员利用螺钉将新的夹具固定的机器臂上,这种操作方法费时费力,降低了工厂自动化生产的效率问题。
3、(二)技术方案
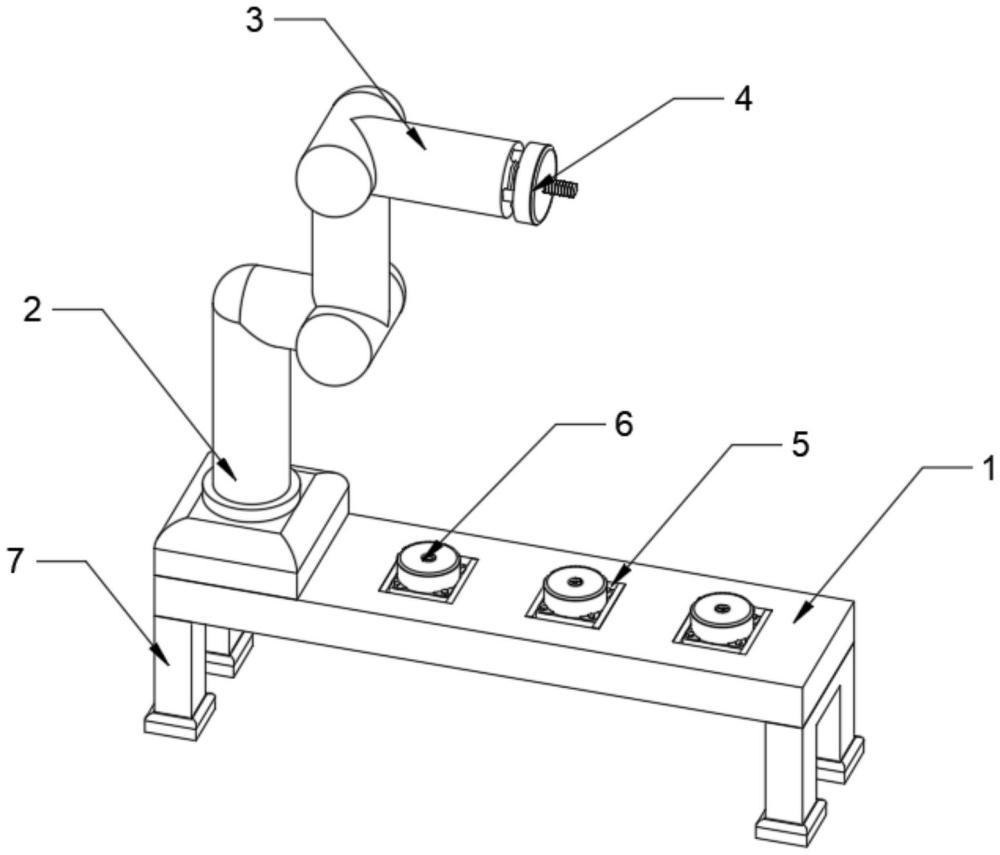
4、为实现以上目的,本实用新型通过以下技术方案予以实现:一种可方便更换的机器人末端夹具包括主板,所述主板上端的左侧连接有机器人运动臂,所述机器人运动臂的末端连接有机器人连接臂,所述机器人连接臂的前端连接有母体机构,所述主板上端的右侧开设有多组通槽,所述通槽内连接有子体机构。
5、优选的,所述主板下端的两侧连接有支撑架。
6、优选的,所述母体机构包括电机、多组连接柱、第一固定盘、轴承、螺杆、第一缓冲垫。
7、优选的,所述电机套接于机器人连接臂的前端,多组所述连接柱位于机器人连接臂的前端且位于电机的外侧,多组所述连接柱的前端连接有第一固定盘,所述第一固定盘内套接有轴承,所述电机的输出轴连接有螺杆,且螺杆套接于轴承的内部,所述第一固定盘的前端连接有第一缓冲垫。
8、优选的,所述子体机构包括夹具、连接板、第二固定盘、第二缓冲垫,所述夹具位于通槽内部,所述夹具的上端连接有连接板,所述连接板的上端连接有第二固定盘,所述第二固定盘的上端连接有第二缓冲垫,所述第二固定盘开设有与螺杆对应的螺纹孔,且第二缓冲垫也开设有与螺纹孔对应的通孔。
9、优选的,所述连接板的两侧连接有限位板,所述限位板的下端连接有支撑板,且限位板与支撑板位于通槽的内壁。
10、(三)有益效果
11、本实用新型提供了一种可方便更换的机器人末端夹具。具备以下有益效果:
12、该主板通过机器人运动臂前端的机器人连接臂连接有母体机构,从而通过母体机构使得能够自动更换夹具,且不需要人工操作,避免的不必要的麻烦,从而使得自动化生产效率提高,通过主板的通槽放置子体机构,通过凹槽内壁的限位板与支撑板对子体机构进行支撑。
技术特征:
1.一种可方便更换的机器人末端夹具,包括主板(1),其特征在于:所述主板(1)上端的左侧连接有机器人运动臂(2),所述机器人运动臂(2)的末端连接有机器人连接臂(3),所述机器人连接臂(3)的前端连接有母体机构(4),所述主板(1)上端的右侧开设有多组通槽(5),所述通槽(5)内连接有子体机构(6)。
2.根据权利要求1所述的一种可方便更换的机器人末端夹具,其特征在于:所述主板(1)下端的两侧连接有支撑架(7)。
3.根据权利要求1所述的一种可方便更换的机器人末端夹具,其特征在于:所述母体机构(4)包括电机(41)、多组连接柱(42)、第一固定盘(43)、轴承(44)、螺杆(45)、第一缓冲垫(46)。
4.根据权利要求3所述的一种可方便更换的机器人末端夹具,其特征在于:所述电机(41)套接于机器人连接臂(3)的前端,多组所述连接柱(42)位于机器人连接臂(3)的前端且位于电机(41)的外侧,多组所述连接柱(42)的前端连接有第一固定盘(43),所述第一固定盘(43)内套接有轴承(44),所述电机(41)的输出轴连接有螺杆(45),且螺杆(45)套接于轴承(44)的内部,所述第一固定盘(43)的前端连接有第一缓冲垫(46)。
5.根据权利要求4所述的一种可方便更换的机器人末端夹具,其特征在于:所述子体机构(6)包括夹具(61)、连接板(62)、第二固定盘(63)、第二缓冲垫(64),所述夹具(61)位于通槽(5)内部,所述夹具(61)的上端连接有连接板(62),所述连接板(62)的上端连接有第二固定盘(63),所述第二固定盘(63)的上端连接有第二缓冲垫(64),所述第二固定盘(63)开设有与螺杆(45)对应的螺纹孔,且第二缓冲垫(64)也开设有与螺纹孔对应的通孔。
6.根据权利要求5所述的一种可方便更换的机器人末端夹具,其特征在于:所述连接板(62)的两侧连接有限位板(8),所述限位板(8)的下端连接有支撑板(9),且限位板(8)与支撑板(9)位于通槽(5)的内壁。
技术总结
本技术公开了一种可方便更换的机器人末端夹具,涉及夹具技术领域。该一种可方便更换的机器人末端夹具包括主板,所述主板上端的左侧连接有机器人运动臂,所述机器人运动臂的末端连接有机器人连接臂,所述机器人连接臂的前端连接有母体机构,所述主板上端的右侧开设有多组通槽,所述通槽内连接有子体机构。该主板通过机器人运动臂前端的机器人连接臂连接有母体机构,从而通过母体机构使得能够自动更换夹具,且不需要人工操作,避免的不必要的麻烦,从而使得自动化生产效率提高,通过主板的通槽放置子体机构,通过凹槽内壁的限位板与支撑板对子体机构进行支撑。
技术研发人员:荣梦杰,杜凯育
受保护的技术使用者:西安外事学院
技术研发日:20230727
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!