一种机械调节的工业机器人末端快换工具的制作方法
本技术涉及工业机器人,具体为一种机械调节的工业机器人末端快换工具。
背景技术:
1、工业机器人,是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,为了使工业机器人的功能更为全面,往往需要对机器人的末端更换拓展工具,而更换拓展工具往往会用到快换工具。现有的一种机械调节的工业机器人末端快换工具(公开号:cn219043888u)在使用中至少暴露出以下缺陷:
2、1、该方案在更换需要的加工工具时,需要工作人员用手托举,使得在更换过程中红,工作人员会和机械臂接近,若此时机械臂发生误动,可能会对相关工作人员造成一定的伤害,造成生产事故;
3、2、该方案在进行更换作业中,需要工作人员手动控制拉手的张合,使得待安装的工具能够插入装置中,使得该更换过程自动化程度较差,影响机械加工流程的正常进行,降低生产效率,因此开发一种机械调节的工业机器人末端快换工具。
技术实现思路
1、本实用新型的主要目的在于提供一种机械调节的工业机器人末端快换工具,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型采取的技术方案为:
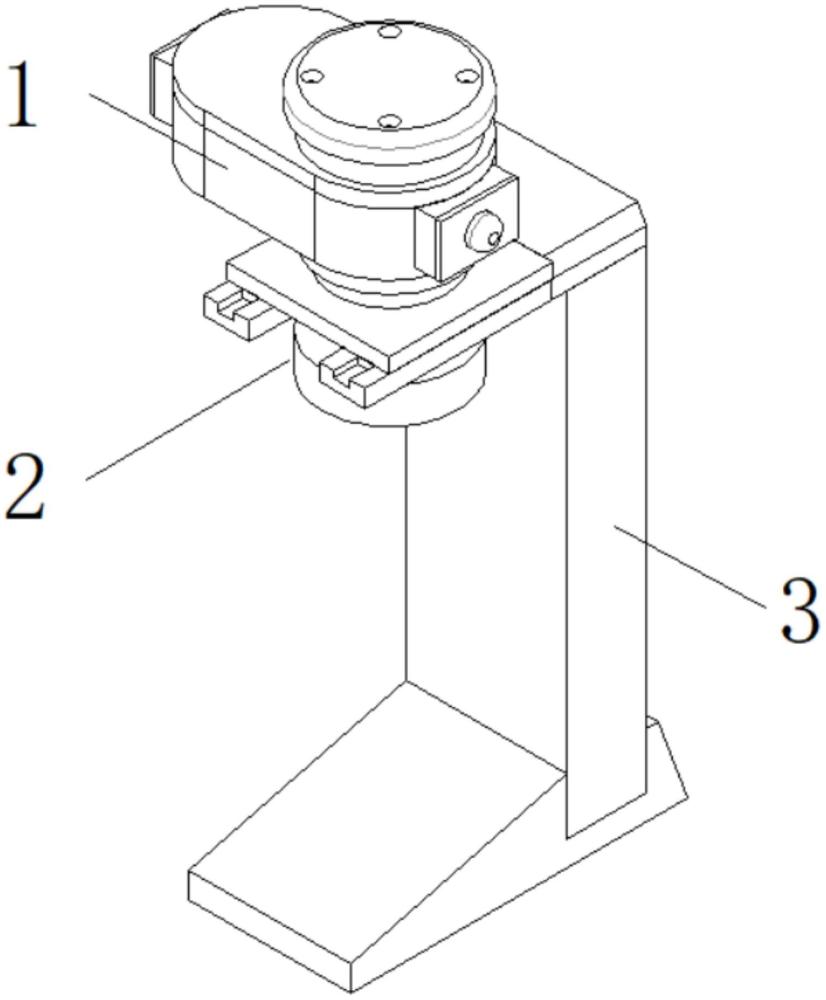
3、一种机械调节的工业机器人末端快换工具,包括工具更换头,所述工具更换头包括一个卡接腔体,所述卡接腔体的底侧固定设置有一圈插入筒,且所述插入筒连通至卡接腔体的内部,所述插入筒的内壁之间插有一个衔接基座,所述衔接基座的顶侧固定连接有一根衔接杆,所述衔接杆外侧滑动连接有一个滑块,所述卡接腔体的两侧分别固定连接有一个固定电磁铁,且两个所述固定电磁铁皆可和滑块相磁吸,所述滑块的底侧和衔接基座的顶侧滑动连接。
4、优选的,所述衔接杆的顶端固定连接有一个抵块,所述卡接腔体的顶侧固定连接有一个压力传感器,所述压力传感器和抵块相对应,并和两个固定电磁铁电性连接。
5、优选的,所述衔接基座的底端固定连接有一片滑动架,所述滑动架的底端和两根对称分布的放置架滑动连接,两根所述放置架的一端共同固定连接有一个放置柱体。
6、优选的,所述滑动架的底端固定连接有一个加工工具,所述加工工具的两侧可分别和两根放置架的相对侧滑动连接。
7、优选的,所述抵块的底侧和滑块的顶侧滑动接触,所述抵块的顶侧可和卡接腔体的顶侧内壁相接触,且所述压力传感器的触发端可和卡接腔体的顶侧内壁相平齐。
8、优选的,所述卡接腔体的顶端固定连接有一个连接法兰,所述连接法兰的顶端固定连接有一根工业机器人机械臂。
9、与现有技术相比,本实用新型具有如下有益效果:
10、本实用新型通过放置柱体、放置架和工具衔接架的设置,将需要跟换的工具按照一定的顺序排布在该工具附近,使得机械臂可以通过自身的运动,将机械臂一端的工作更换头和工具衔接架接触并固定,从而在无人帮托的情况下进行工具快换,避免伤害相关工作人员;
11、同时,通过固定电磁铁和卡接腔体的设置,使得插入卡接腔体中的滑块发生移动,从而将工具更换头和工具衔接架固定在一起,使得工具衔接架可以自动更换,提高生产效率。
技术特征:
1.一种机械调节的工业机器人末端快换工具,包括工具更换头(1),其特征在于:所述工具更换头(1)包括一个卡接腔体(101),所述卡接腔体(101)的底侧固定设置有一圈插入筒(105),且所述插入筒(105)连通至卡接腔体(101)的内部,所述插入筒(105)的内壁之间插有一个衔接基座(204),所述衔接基座(204)的顶侧固定连接有一根衔接杆(202),所述衔接杆(202)外侧滑动连接有一个滑块(203),所述卡接腔体(101)的两侧分别固定连接有一个固定电磁铁(104),且两个所述固定电磁铁(104)皆可和滑块(203)相磁吸,所述滑块(203)的底侧和衔接基座(204)的顶侧滑动连接。
2.根据权利要求1所述的一种机械调节的工业机器人末端快换工具,其特征在于:所述衔接杆(202)的顶端固定连接有一个抵块(201),所述卡接腔体(101)的顶侧固定连接有一个压力传感器(102),所述压力传感器(102)和抵块(201)相对应,并和两个固定电磁铁(104)电性连接。
3.根据权利要求1所述的一种机械调节的工业机器人末端快换工具,其特征在于:所述衔接基座(204)的底端固定连接有一片滑动架(205),所述滑动架(205)的底端和两根对称分布的放置架(206)滑动连接,两根所述放置架(206)的一端共同固定连接有一个放置柱体(3)。
4.根据权利要求3所述的一种机械调节的工业机器人末端快换工具,其特征在于:所述滑动架(205)的底端固定连接有一个加工工具,所述加工工具的两侧可分别和两根放置架(206)的相对侧滑动连接。
5.根据权利要求2所述的一种机械调节的工业机器人末端快换工具,其特征在于:所述抵块(201)的底侧和滑块(203)的顶侧滑动接触,所述抵块(201)的顶侧可和卡接腔体(101)的顶侧内壁相接触,且所述压力传感器(102)的触发端可和卡接腔体(101)的顶侧内壁相平齐。
6.根据权利要求1所述的一种机械调节的工业机器人末端快换工具,其特征在于:所述卡接腔体(101)的顶端固定连接有一个连接法兰(103),所述连接法兰(103)的顶端固定连接有一根工业机器人机械臂。
技术总结
本技术公开了一种机械调节的工业机器人末端快换工具,涉及工业机器人技术领域。包括一个卡接腔体,所述卡接腔体的内部插有一个滑块,所述卡接腔体的两侧分别固定连接有一个固定电磁铁。本技术通过通过放置柱体、放置架和工具衔接架的设置,将需要跟换的工具按照一定的顺序排布在该工具附近,使得机械臂可以通过自身的运动,将机械臂一端的工作更换头和工具衔接架接触并固定,从而在无人帮托的情况下进行工具快换,避免伤害相关工作人员;同时,通过固定电磁铁和卡接腔体的设置,使得插入卡接腔体中的滑块发生移动,从而将工具更换头和工具衔接架固定在一起,使得工具衔接架可以自动更换,提高生产效率。
技术研发人员:干新桥
受保护的技术使用者:南通玉桂信息科技有限公司
技术研发日:20230801
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!