多自由度仿生机械臂的制作方法
本申请涉及自动化领域,具体涉及多自由度仿生机械臂。
背景技术:
1、机械手臂是结合现代自动化领域的高精度、多输入和多输出的复杂机构。在机器人和自动化设备领域中,经常用到机械臂,用其通过模仿人手和臂的动作和功能代替人工,伴随着科技和人工智能的不断发展,传统机械臂的自由度较少已经无法满足人类的需求,并且这类机械臂笨拙,制造相对复杂,因此,在一些必要场合需要灵活性和多自由度的机械臂参与工程。多自由度仿生机械臂作为机器人发展的高级阶段,是仿生学与机械臂的领域的结合产物。
2、为解决已有技术的不足,此多自由度仿生机械臂在结构和功能上对传统的机械臂进行了完善,增加了自由度,提高了机械臂的灵活性,并且可以广泛应用于高危工作,消除了人工在高危作业时的安全隐患。多自由度仿生机械臂的设计和应用问题,不仅具有普遍的工程意义,还具有深入探讨和学习的理论意义。
技术实现思路
1、(一)技术问题
2、针对上述现有技术,现有技术的问题在于:在机械手臂抓取时,由于自由度不足,转向单依靠底盘的转动,转向时需要转动整个机械手臂,转向不灵活,抓取调整较慢。
3、(二)技术方案
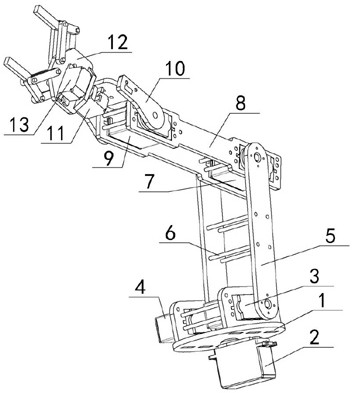
4、针对上述技术问题,本申请提出的多自由度仿生机械臂,其特征在于:包括底盘和安装在所述底盘下方的底盘舵机;所述底盘舵机的输出端固定连接所述底盘;在所述底盘上固定安装有内大臂舵机和外大臂舵机;在所述内大臂舵机和外大臂舵机的输出端通过铰链结构连接有大臂的一端;所述大臂通过加强杆连接;所述大臂的另一端通过铰链结构连接中臂的一端及中臂舵机的输出端;所述中臂舵机固定在中臂上;所述中臂的另一端固定有小臂舵机,所述小臂舵机的输出端铰接小臂的一端;所述小臂的另一端固定连接托板;在所述托板上固定连接转动舵机;在所述转动舵机的输出端连接抓手固定板;在所述固定板上安装有抓手舵机;在所述抓手舵机的输出端铰接齿轮肘杆;在所述齿轮肘杆末端铰接抓手;在所述固定板和所述抓手中间用连杆铰接。
5、进一步地,所述抓手舵机、齿轮肘杆、抓手和连杆之间的铰接点形成平行四边形结构。
6、进一步地,所述齿轮肘杆的数量为2,齿轮肘杆上的轮齿数量为4,且轮齿所占扇形部分的中心角度为150°。
7、进一步地,所述大臂为双板结构,采用加强杆连接双板加强。
8、进一步地,所述中臂为双板结构,采用加强杆连接双板加强。
9、进一步地,所述小臂为双板结构,采用加强杆连接双板加强。
10、进一步地,所述抓手的数量为2。
11、进一步地,所述连杆的数量为2。
12、(三)有益效果
13、本申请通过设计,实现机械臂底盘360旋转,抓手360旋转,通过大臂、中臂、小臂和机械手的四级传动,增加了转向自由度。通过双板-连杆结构减轻了机械臂的重量,提高了灵活性。
技术特征:
1.多自由度仿生机械臂,其特征在于:包括底盘和安装在所述底盘下方的底盘舵机;所述底盘舵机的输出端固定连接所述底盘;在所述底盘上固定安装有内大臂舵机和外大臂舵机;在所述内大臂舵机和外大臂舵机的输出端通过铰链结构连接有大臂的一端;所述大臂通过加强杆连接;所述大臂的另一端通过铰链结构连接中臂的一端及中臂舵机的输出端;所述中臂舵机固定在中臂上;所述中臂的另一端固定有小臂舵机,所述小臂舵机的输出端铰接小臂的一端;所述小臂的另一端固定连接托板;在所述托板上固定连接转动舵机;在所述转动舵机的输出端连接抓手固定板;在所述固定板上安装有抓手舵机;在所述抓手舵机的输出端铰接齿轮肘杆;在所述齿轮肘杆末端铰接抓手;在所述固定板和所述抓手中间用连杆铰接。
2.根据权利要求1所述的多自由度仿生机械臂,其特征在于:所述抓手舵机、齿轮肘杆、抓手和连杆之间的铰接点形成平行四边形结构。
3.根据权利要求1所述的多自由度仿生机械臂,其特征在于:所述齿轮肘杆的数量为2,齿轮肘杆上的轮齿数量为4,且轮齿所占扇形部分的中心角度为150°。
4.根据权利要求1所述的多自由度仿生机械臂,其特征在于:所述大臂为双板结构,采用加强杆连接双板加强。
5.根据权利要求1所述的多自由度仿生机械臂,其特征在于:所述中臂为双板结构,采用加强杆连接双板加强。
6.根据权利要求1所述的多自由度仿生机械臂,其特征在于:所述小臂为双板结构,采用加强杆连接双板加强。
7.根据权利要求1所述的多自由度仿生机械臂,其特征在于:所述抓手的数量为2。
8.根据权利要求1所述的多自由度仿生机械臂,其特征在于:所述连杆的数量为2。
技术总结
多自由度仿生机械臂,其特征在于:包括底盘和安装在所述底盘下方的底盘舵机;在所述底盘上固定安装有两件大臂舵机;在所述内外大臂舵机的输出端通过铰链结构连接有大臂的一端;所述大臂通过铰链结构连接中臂及中臂舵机的输出端;所述中臂舵机固定在中臂上;所述中臂固定连接小臂舵机,所述小臂舵机的输出端铰接小臂的一端;所述小臂的另一端固定连接托板;在所述托板上固定连接转动舵机;所述转动舵机的输出端连接抓手固定板;在所述固定板上安装有抓手舵机;在所述抓手舵机的输出端铰接齿轮肘杆;所述齿轮肘杆末端铰接抓手;所述固定板和所述抓手中间用连杆铰接。本申请通过设计,实现机械臂底盘和抓手360°旋转,增加了转向自由度。
技术研发人员:乐伟伟
受保护的技术使用者:盐城生物工程高等职业技术学校
技术研发日:20230802
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!