一种具有信号采样电路的机械手的制作方法
本申请属于机械人,更具体地说,涉及一种具有信号采样电路的机械手。
背景技术:
1、机械手通常具有多个关节且物理空间比较狭小,为了在狭小的空间实现对各个关节进行独立控制,在现有技术中腱传动技术被应用于驱动机器手的多个关节。包括多个驱动单元的驱动组件通常被设置在较远的区域如小臂,驱动单元可通过腱来控制关节的运动。在腱的外侧可设置腱鞘,腱在腱鞘中可滑动。所述腱鞘的一端固定在受驱动的关节位置处,所述腱鞘的另一端进入所述小臂模块并固定在所述小臂的驱动组件处。
2、机器人特别是机器人身上功能接近人手的机械手,需要能够灵活精细地操作物体,还需要布置一定数量的传感器。所述传感器通过引线与信号采集电路板进行连接,所述信号采集电路板也位于所述小臂。
3、腱鞘和引线的数量较多,腱鞘、引线和信号采集电路板在所述小臂处如何合理布置是本领域技术人员索要考虑的技术问题。
技术实现思路
1、为了解决上述现有技术的技术问题,本申请实施例的提供了一种具有信号采样电路的机械手。
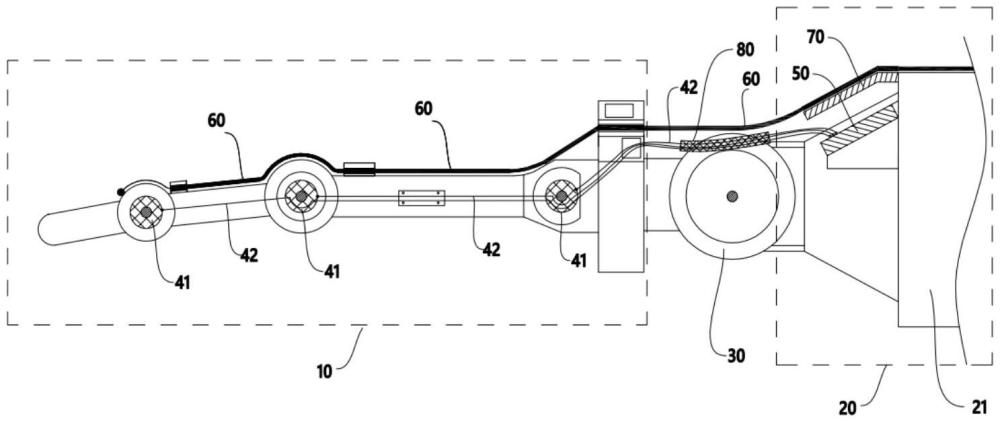
2、为实现上述目的,本申请采用的技术方案是:提供了一种具有信号采样电路的机械手,所述机械手具有多个关节;所述机械手包括手部模块和小臂模块;所述机械手还包括信号采样电路;所述手部模块设置有传感器,所述信号采样电路包括传感器、引线和信号采集电路板;所述信号采集电路板设置在所述小臂模块;所述机械手包括用于驱动所述关节运动的腱传动组件,所述腱传动组件包括腱和腱鞘,所述腱鞘经过所述信号采集电路板;所述信号采集电路板处设有仓盖,所述信号采集电路板和所述腱鞘分别位于所述仓盖的两侧。
3、在本申请的一种实施例中,所述信号采集电路板倾斜安装;和/或,所述仓盖倾斜安装。
4、在本申请的一种实施例中,所述机械手还包括位于手部模块和小臂模块之间的腕部关节组件;所述小臂模块包括驱动仓。
5、在本申请的一种实施例中,所述信号采集电路板位于所述腕部关节组件和所述驱动仓之间,或者,所述信号采集电路板位于所述腕部关节组件的后端支架;或者,所述信号采集电路板位于所述驱动仓。
6、在本申请的一种实施例中,所述腱鞘从倾斜安装的所述信号采集电路板上爬坡后与所述驱动仓的腱鞘固定端连接。
7、在本申请的一种实施例中,所述仓盖至少部分是半透明或者透明的。
8、在本申请的一种实施例中,所述信号采集电路板上的传感器接线区设置有多排的传感器接线端口,多个所述引线分别与所述信号采集电路板上的所述传感器接线端口电连接。
9、在本申请的一种实施例中,所述传感器接线区位于所述信号采集电路板的一侧;多个所述引线从所述手部模块出来后,从所述信号采集电路板的一侧进入并与所述传感器接线端口电连接。
10、在本申请的一种实施例中,所述机械手还包括束线结构,多个所述引线从所述手部模块出来后,通过束线结构集中在一起,再与所述传感器接线端口电连接。
11、在本申请的一种实施例中,所述仓盖在所述信号采集电路板处形成全包围或者半包围结构;和/或,所述仓盖上具有屏蔽层。
12、本申请的有益效果在于:
13、本申请的具有信号采样电路的机械手,通过设置所述仓盖可避免所述腱鞘与所述信号采集电路板接触;同时,所述仓盖还隔开了所述腱鞘和所述引线,可防止引线和腱鞘之间相互影响。因此,实现了所述腱鞘与所述引线和所述信号采集电路板之间的解耦、分层。所述信号采样电路的性能更加可靠。
技术特征:
1.一种具有信号采样电路的机械手,所述机械手具有多个关节;所述机械手包括手部模块和小臂模块;其特征在于,所述机械手还包括信号采样电路;所述手部模块设置有传感器,所述信号采样电路包括传感器、引线和信号采集电路板;所述信号采集电路板设置在所述小臂模块;所述机械手包括用于驱动所述关节运动的腱传动组件,所述腱传动组件包括腱和腱鞘,所述腱鞘经过所述信号采集电路板;所述信号采集电路板处设有仓盖,所述信号采集电路板和所述腱鞘分别位于所述仓盖的两侧。
2.根据权利要求1所述的机械手,其特征在于,所述信号采集电路板倾斜安装;和/或,所述仓盖倾斜安装。
3.根据权利要求2所述的机械手,其特征在于,所述机械手还包括位于手部模块和小臂模块之间的腕部关节组件;所述小臂模块包括驱动仓。
4.根据权利要求3所述的机械手,其特征在于,所述信号采集电路板位于所述腕部关节组件和所述驱动仓之间,或者,所述信号采集电路板位于所述腕部关节组件的后端支架;或者,所述信号采集电路板位于所述驱动仓。
5.根据权利要求3所述的机械手,其特征在于,所述腱鞘从倾斜安装的所述仓盖上爬坡后与所述驱动仓的腱鞘固定端连接。
6.根据权利要求1所述的机械手,其特征在于,所述仓盖至少部分是半透明或者透明的。
7.根据权利要求2所述的机械手,其特征在于,所述信号采集电路板上的传感器接线区设置有多排的传感器接线端口,多个所述引线分别与所述信号采集电路板上的所述传感器接线端口电连接。
8.根据权利要求7所述的机械手,其特征在于,所述传感器接线区位于所述信号采集电路板的一侧;多个所述引线从所述手部模块出来后,从所述信号采集电路板的一侧进入并与所述传感器接线端口电连接。
9.根据权利要求8所述的机械手,其特征在于,所述机械手还包括束线结构,多个所述引线从所述手部模块出来后,通过束线结构集中在一起,再与所述传感器接线端口电连接。
10.根据权利要求1所述的机械手,其特征在于,所述仓盖在所述信号采集电路板处形成全包围或者半包围结构;和/或,所述仓盖上具有屏蔽层。
技术总结
本技术公开了一种具有信号采样电路的机械手,所述机械手具有多个关节;所述机械手还包括信号采样电路;所述手部模块设置有传感器,所述信号采样电路包括传感器、引线和信号采集电路板;所述信号采集电路板设置在所述小臂模块;所述机械手包括腱鞘,所述腱鞘经过所述信号采集电路板;所述信号采集电路板处设有仓盖,所述信号采集电路板和所述腱鞘分别位于所述仓盖的两侧。本申请的所述仓盖可避免所述腱鞘与所述信号采集电路板接触;同时,所述仓盖还隔开了所述腱鞘和所述引线,可防止引线和腱鞘之间相互影响。因此,实现了所述腱鞘与所述引线和所述信号采集电路板之间的解耦、分层。所述信号采样电路的性能更加可靠。
技术研发人员:周志涛,刘寅,任化龙
受保护的技术使用者:深圳忆海原识科技有限公司
技术研发日:20230816
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!