化工储罐罐组巡检机器人的制作方法
本技术属于智能巡检领域,具体地说,尤其涉及一种化工储罐罐组巡检机器人。
背景技术:
1、化工储罐罐区存放大量的易燃、易爆、腐蚀等性质的物料,是企业的重点管控对象。罐区一旦发生安全事故,往往会造成人员伤亡和环境污染,还会引发社会公众的恐慌情绪。因此,对于罐区的管理和维护显得尤为重要。
2、如今智能巡检机器人作为一种巡检的装置,可以替代工人进行检测化工储罐周围有害气体,避免化工储罐发生泄漏从而发生危险事故,实现安全生产管理。因此,智能巡检机器人在工业场景获得基本的普及。
3、公开号cn113232006a的申请公开了一种煤化工智能巡检机器人、智能巡检系统及巡检方法,其包括底座、安装于所述底座的吊装部件、与所述吊装部件连接并用于驱动所述吊装部件沿所述轨道往复滑动的驱动部件及安装于所述底座的传感器组;该装置可在煤化工区域进行巡检,能够有效提升焦炉加热安全性能,但其结构复杂,装置充电需要退出工作场景,操作不便。目前正缺少一种可以无线充电的罐组巡检机器人。
技术实现思路
1、本实用新型的目的,在于提供一种化工储罐罐组巡检机器人,巡检机器人距储罐的距离近,又能够不受现场障碍限制、适应能力比较强的智能巡检机器人,可以代替人工进行罐区监控。
2、本实用新型是通过以下技术方案实现的:
3、一种化工储罐罐组巡检机器人,包括轨道和巡检车体,轨道上设有充电座,所述巡检车体上设有行走机构,行走机构与轨道配合行走,巡检车体上设有摄像结构和voc检测器,视觉传感器和voc检测器分别连接主控制器,主控制器设于巡检车体内,主控制器连接通讯模块,通讯模块与服务器端双向连接,巡检机器人内部设有电池,电池经过整流电路连接无线充电盘,无线充电盘设于巡检车体底部,无线充电盘与充电座配合。
4、进一步地,所述的行走机构包括驱动电机和驱动轮,驱动电机由主控制器控制,驱动电机连接驱动轮,驱动轴两端设有驱动轮。驱动轮设有限位槽,限位槽可以与轨道限位,防止车体脱离轨道。
5、进一步地,所述的驱动电机采用差速电机,差速电机包括直流电机和滑差离合器,可以调节车辆转弯时两侧驱动轮不同的转速。
6、进一步地,所述的轨道为闭合轨道,轨道绕罐组设置,车体可按闭合轨道的铺设进行周而复始的巡检。
7、进一步地,所述的摄像机构包括一个高清摄像头和一个广角摄像头,两个摄像头适用于多种工况,更好地检测罐体是否出现破损,以及观测轨道上是否有杂物阻拦,保证行驶安全。
8、进一步地,所述的voc检测器包括进气管路和出气管路,进气管路和出气管路分别设于车体两侧,便于voc检测器进行气体检测。
9、进一步地,所述的无线充电盘内部设有接收线圈,所述的充电座内部设有发射线圈,接收线圈与发射线圈耦合实现无线充电。
10、与现有技术相比,本实用新型的有益效果是:
11、1、本实用新型采用闭合轨道,车体可按闭合轨道的铺设进行周而复始的巡检,车体内设有voc检测器,本装置在代替人工进行巡检,可以检测化工储罐周围有害气体。
12、2、本实用新型采用无线充电盘和充电座配合的方式,本装置可以不脱离工作环境进行充点,无需人员到场,直接在轨道上进行充电,方便快捷;车体上设有摄像机构,可实时将视频数据传输至服务器端,进行实时监控。
技术特征:
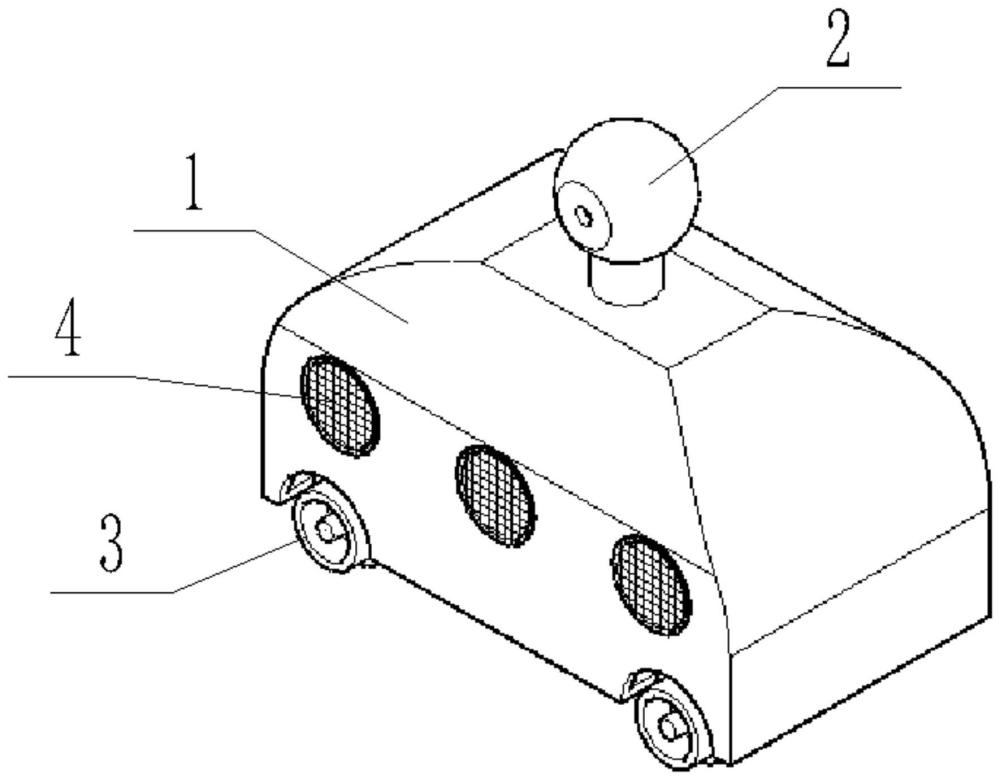
1.一种化工储罐罐组巡检机器人,包括轨道(9)和巡检车体(1),其特征在于:轨道(9)上设有充电座(8),所述巡检车体(1)上设有行走机构,行走机构与轨道(9)配合行走,巡检车体(1)上设有摄像机构(2)和voc检测器,行走机构、视觉传感器和voc检测器分别连接主控制器,主控制器设于巡检车体(1)内,主控制器连接通讯模块,通讯模块与服务器端双向连接,巡检机器人内部设有电池,电池经过整流电路连接无线充电盘(5),无线充电盘(5)设于巡检车体(1)底部,无线充电盘(5)与充电座(8)配合。
2.根据权利要求1所述的化工储罐罐组巡检机器人,其特征在于:所述的行走机构包括驱动电机和驱动轮(3),驱动电机连接驱动轮(3),驱动轴两端设有驱动轮(3)。
3.根据权利要求2所述的化工储罐罐组巡检机器人,其特征在于:所述的驱动电机采用差速电机,差速电机包括直流电机和滑差离合器。
4.根据权利要求1所述的化工储罐罐组巡检机器人,其特征在于:所述的轨道(9)为闭合轨道(9)。
5.根据权利要求2所述的化工储罐罐组巡检机器人,其特征在于:所述的摄像机构(2)包括一个高清摄像头和一个广角摄像头。
6.根据权利要求1所述的化工储罐罐组巡检机器人,其特征在于:所述的voc检测器包括进气管路(4)和出气管路(6),进气管路(4)和出气管路(6)分别设于车体(1)两侧。
7.根据权利要求1所述的化工储罐罐组巡检机器人,其特征在于:所述的无线充电盘(5)内部设有接收线圈,所述的充电座(8)内部设有发射线圈,接收线圈与发射线圈耦合。
技术总结
本技术公开了一种化工储罐罐组巡检机器人,它属于智能巡检领域,其距储罐的距离近,又能够不受现场障碍限制、适应能力比较强的智能巡检机器人,可以代替人工进行罐区监控。它主要包括轨道和巡检车体,轨道上设有充电座,所述巡检车体上设有行走机构,行走机构与轨道配合行走,巡检车体上设有摄像结构和VOC检测器,视觉传感器和VOC检测器分别连接主控制器,主控制器连接通讯模块,巡检机器人内部设有电池,电池经过整流电路连接无线充电盘,无线充电盘设于巡检车体底部,无线充电盘与充电座配合。
技术研发人员:王海静
受保护的技术使用者:中国石油化工股份有限公司
技术研发日:20230905
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!