一种晶圆盒搬运机器人的制作方法
本技术属于晶圆盒搬运设备,具体是一种晶圆盒搬运机器人。
背景技术:
1、晶圆盒搬运机器人能够自动地从一个位置搬运晶圆盒到另一个位置,例如从存储区域到加工设备,或从一个工序到下一个工序;现有技术中的搬运机器人多采用夹持臂结构进行晶圆盒搬运,但在长期使用中,夹持臂结构每次张合均需花费较长时间,严重影响搬运效率。因此,有必要提供一种晶圆盒搬运机器人,以解决上述背景技术中提出的问题。
技术实现思路
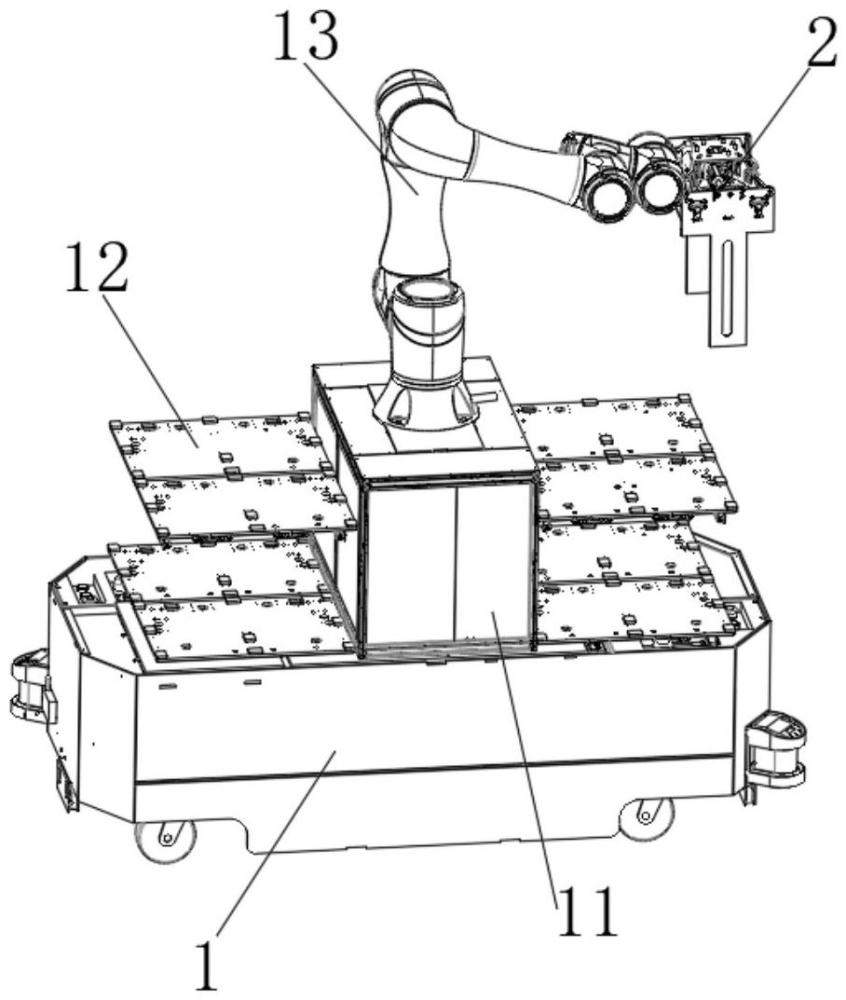
1、为实现上述目的,本实用新型提供如下技术方案:一种晶圆盒搬运机器人,其包括:avg搬运车,其上端面中固定有机箱载体,所述机箱载体的两侧位置对称排列设置有多个载板,所述机箱载体的上方设置有搬运机械臂,所述搬运机械臂的端部安装有夹取搬运机构;
2、所述夹取搬运机构包括:定位架,其上左右滑动设置有连接架座,所述连接架座上连接有伸缩驱动杆,所述伸缩驱动杆的伸缩端均与所述定位架相连接,所述连接架座上均竖直固定有夹板,所述夹板上设有自锁卸载组件,并由所述自锁卸载组件对晶圆盒凸出边沿接触夹持;
3、所述自锁卸载组件包括:旋转座,固定在夹板上,所述旋转座的一侧转动连接有夹持臂,所述夹持臂的端部固定有定位件,所述夹持臂上位于旋转座上方连接有支撑弹簧,所述支撑弹簧的一端与夹板相连接,所述夹板上垂直固定有l形架,所述l形架上铰接有联杆,所述夹持臂的上端转动连接有自锁套,所述联杆的一端滑动设置在自锁套内;
4、所述自锁套内对称固定有多个限位件,所述限位件的横截面呈三角结构,所述自锁套内同轴固定有限位杆,所述限位杆的一端滑动伸入联杆中,所述联杆的端部固定有锥轴体,所述锥轴体横截面较小的一侧端面靠近自锁套设置,所述自锁套端部开设有多个导口,各所述导口与限位件间隔分布;
5、所述联杆上通过连接弹簧滑动设置有复位轴体,所述复位轴体能够滑动作用下将自锁套端部扩撑并通过限位件锁扣在自锁套中。
6、进一步,作为优选,各所述伸缩驱动杆独立伸缩调节,使得所述连接架座能够对称或非对称分布在定位架上。
7、进一步,作为优选,所述复位轴体相对所述锥轴体呈反向设置,且所述锥轴体横截面较大的一侧端面侧沿设有弧形曲面。
8、进一步,作为优选,所述自锁套在持续滑动中能够对复位轴体进行套取,并在反向复位时使得复位轴体同步位移,连接弹簧产生拉伸,直至复位轴体与锥轴体相接触,所述连接弹簧弹力强度大于所述支撑弹簧弹力强度。
9、进一步,作为优选,所述夹板上位于定位件上方还设置有引导件,所述引导件的一侧截面被设置为斜面结构。
10、进一步,作为优选,所述夹板下压位移时,晶圆盒能够通过引导件拨动夹持臂向两侧扩展。
11、进一步,作为优选,在晶圆盒搬运中所述夹板下压通过定位件拨动夹持臂向两侧扩展,此时自锁套与锥轴体相锁扣,此时定位件对晶圆盒凸出边沿接触夹持。
12、与现有技术相比,本实用新型的有益效果是:
13、本实用新型中主要采用的夹取搬运机构在初次搬运中能够根据晶圆盒大小进行夹板张合大小调节,而后在搬运中仅需通过搬运机械臂驱动定位架下压夹取晶圆盒即可,无需对夹板张合二次调节,提高搬运效率;尤其在卸运中,搬运机械臂也仅需驱动定位架再次下压,使得自锁套与联杆解锁即可,进一步提高搬运效率。
技术特征:
1.一种晶圆盒搬运机器人,其特征在于:其包括:avg搬运车(1),其上端面中固定有机箱载体(11),所述机箱载体(11)的两侧位置对称排列设置有多个载板(12),所述机箱载体(11)的上方设置有搬运机械臂(13),所述搬运机械臂(13)的端部安装有夹取搬运机构(2);
2.根据权利要求1所述的一种晶圆盒搬运机器人,其特征在于:各所述伸缩驱动杆(23)独立伸缩调节,使得所述连接架座(22)能够对称或非对称分布在定位架(21)上。
3.根据权利要求1所述的一种晶圆盒搬运机器人,其特征在于:所述复位轴体(44)相对所述锥轴体(43)呈反向设置,且所述锥轴体(43)横截面较大的一侧端面侧沿设有弧形曲面(45)。
4.根据权利要求3所述的一种晶圆盒搬运机器人,其特征在于:所述自锁套(4)在持续滑动中能够对复位轴体(44)进行套取,并在反向复位时使得复位轴体(44)同步位移,连接弹簧产生拉伸,直至复位轴体与锥轴体相接触,所述连接弹簧弹力强度大于所述支撑弹簧(33)弹力强度。
5.根据权利要求1所述的一种晶圆盒搬运机器人,其特征在于:所述夹板(24)上位于定位件(32)上方还设置有引导件(35),所述引导件(35)的一侧截面被设置为斜面结构。
6.根据权利要求5所述的一种晶圆盒搬运机器人,其特征在于:所述夹板(24)下压位移时,晶圆盒能够通过引导件(35)拨动夹持臂(31)向两侧扩展。
7.根据权利要求6所述的一种晶圆盒搬运机器人,其特征在于:在晶圆盒搬运中所述夹板(24)下压通过定位件(32)拨动夹持臂(31)向两侧扩展,此时自锁套(4)与锥轴体(43)相锁扣,此时定位件(32)对晶圆盒凸出边沿接触夹持。
技术总结
本技术公开了一种晶圆盒搬运机器人,其包括:AVG搬运车,其上端面中固定有机箱载体,所述机箱载体的两侧位置对称排列设置有多个载板,所述机箱载体的上方设置有搬运机械臂,所述搬运机器臂的端部安装有夹取搬运机构;所述夹取搬运机构包括:定位架,其上左右滑动设置有连接架座,所述连接架座上连接有伸缩驱动杆,所述伸缩驱动杆的伸缩端均与所述定位架相连接,所述连接架座上均竖直固定有夹板,所述夹板上设有自锁卸载组件。
技术研发人员:洪成都,李辉权,吴楷浚
受保护的技术使用者:捷螺智能设备(苏州)有限公司
技术研发日:20230912
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!