一种焊接机器人的制作方法
本技术涉及机器人焊接,具体涉及一种焊接机器人。
背景技术:
1、机器人焊接是指机器人代替手工作业,利用焊接机器人系统完成焊接作业、获得合格焊件的过程;按照机器人所用焊接工艺方法不同,可将其分为点焊机器人、弧焊机器人及激光焊机器人等类型,机器人在焊接领域得到了广泛应用。
2、现有技术中,焊接机器人可在地轨内受控移动,线缆一端连接在焊接机器人上,另一端与控制设备相接,机器人移动时拖拽线缆同步在导轨内部移动;线缆自导轨的其中一端进入导轨内部,导致机器人运动至导轨的另一端时,线缆在导轨内的拖拽长度近似为导轨的长度,导致线缆的使用长度过长,线缆成本随长度递增,使得焊接成本较高,拖拽部分易损坏,同时线缆过长使数据传输的速度减慢,影响焊接效率与焊接质量。
技术实现思路
1、因此,本实用新型要解决的技术问题在于克服现有技术中线缆的拖拽长度过长的缺陷,从而提供一种减少线缆拖拽长度的焊接机器人。
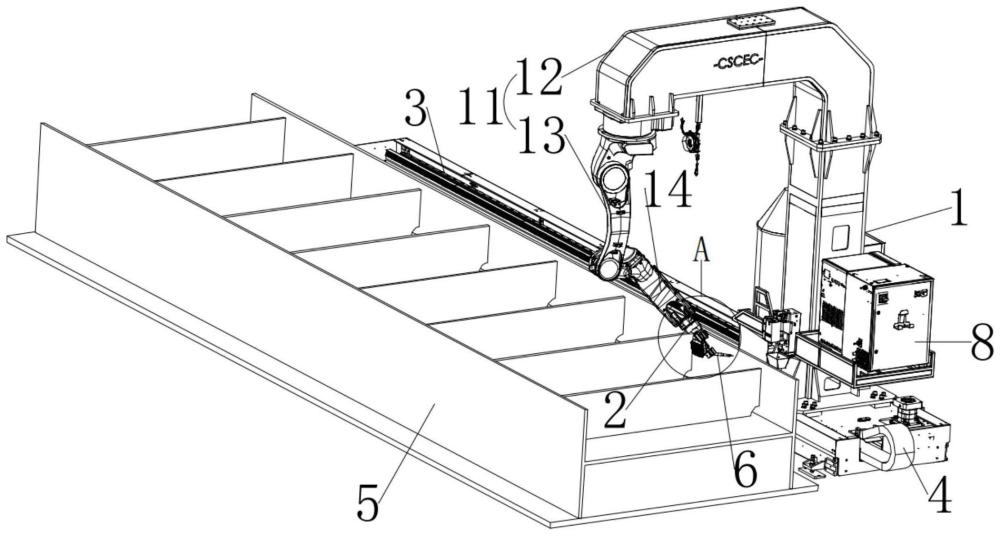
2、为解决上述技术问题,本实用新型提供的一种焊接机器人,包括:
3、主体;
4、导轨,所述主体滑动连接在所述导轨上;所述导轨的中间部位处设有开口;
5、线缆,一端与所述主体连接,另一端与外部设备相接;所述线缆被所述主体拖拽,并随所述主体在所述导轨内部移动;
6、所述线缆自所述开口进入所述导轨内,使所述线缆的最大伸长量小于等于所述导轨长度的一半。
7、可选的,还包括:悬臂,转动连接在所述主体上;
8、安装部,连接在所述悬臂与焊枪之间;所述安装部包括:
9、固定板,固定在所述悬臂上;
10、安装板,设于所述固定板上,并与所述固定板呈一定角度设置;所述焊枪可拆卸安装于所述安装板上。
11、可选的,所述焊枪的部分外壁朝径向延伸形成有凸起;
12、所述凸起与块体夹置于所述安装板的两侧;
13、螺栓依次贯穿所述块体、所述安装板,与所述凸起连接,使所述焊枪固定于所述安装板上。
14、可选的,所述导轨平行于中厚板构件的长度方向设置。
15、可选的,还包括:拍摄器,固定在所述焊枪上,且所述拍摄器的镜头朝向所述中厚板构件设置。
16、可选的,所述悬臂包括支撑臂和转动连接于所述支撑臂上的回转臂;
17、所述支撑臂由所述主体顶端的部分壁体向上延伸并朝靠近所述中厚板构件的方向折弯形成,适于使所述回转臂稳固悬接在焊接机器人上;
18、所述回转臂具有至少两个依次转动连接的臂体,使安装于所述回转臂上的所述焊枪具有多个移动自由度。
19、可选的,所述导轨由多个拼接单元沿所述中厚板构件的长度方向拼接而成。
20、可选的,还包括:控制装置,设于所述主体上,适于控制所述回转臂及所述焊枪动作。
21、本实用新型技术方案,具有如下优点:
22、1.本实用新型提供的焊接机器人,通过在导轨沿长度方向的中间部位处设置开口,使得线缆自导轨的中部进入,当焊接机器人在导轨上左右滑动时,线缆的最大使用长度小于或等于导轨长度的一半,使线缆的使用成本成倍缩减,结构简单,使用方便;设计合理,减少线缆受其他构件触碰损坏的可能性,提高线缆的使用寿命。
23、2.本实用新型提供的焊接机器人,焊枪借助连接部件可拆卸安装在所述安装板上位于l型内侧的板面上,使焊枪与末端悬臂近似共线设置,利于焊枪焊接位置的控制,提高焊接精准度;进一步的,所述连接部件可以为多个螺栓,极大节约更换及安装焊枪的时间,实用性强。
技术特征:
1.一种焊接机器人,其特征在于,包括:
2.根据权利要求1所述的焊接机器人,其特征在于,还包括:
3.根据权利要求2所述的焊接机器人,其特征在于,所述焊枪(6)的部分外壁朝径向延伸形成有凸起(61);
4.根据权利要求2所述的焊接机器人,其特征在于,所述导轨(3)平行于中厚板构件(5)的长度方向设置。
5.根据权利要求4所述的焊接机器人,其特征在于,还包括:拍摄器(62),固定在所述焊枪(6)上,且所述拍摄器(62)的镜头朝向所述中厚板构件(5)设置。
6.根据权利要求4所述的焊接机器人,其特征在于,所述悬臂(11)包括支撑臂(12)和转动连接于所述支撑臂(12)上的回转臂(13);
7.根据权利要求6所述的焊接机器人,其特征在于,所述导轨(3)由多个拼接单元(32)沿所述中厚板构件(5)的长度方向拼接而成。
8.根据权利要求6所述的焊接机器人,其特征在于,还包括:控制装置(8),设于所述主体(1)上,适于控制所述回转臂(13)及所述焊枪(6)动作。
技术总结
本技术涉及机器人焊接技术领域,具体涉及一种焊接机器人。所述焊接机器人包括:主体;导轨,主体滑动连接在导轨上;导轨的中间部位处设有开口;线缆,一端与主体连接,另一端与外部设备相接;线缆被主体拖拽,并随主体在导轨内部移动;线缆自开口进入导轨内,使线缆的最大伸长量小于等于导轨长度的一半。本技术提供的焊接机器人,通过在导轨沿长度方向的中间部位处设置开口,使得线缆自导轨的中部进入,当焊接机器人在导轨上左右滑动时,线缆的最大使用长度小于或等于导轨长度的一半,使线缆的使用成本成倍缩减,结构简单,使用方便;设计合理,减少线缆受其他构件触碰损坏的可能性,提高线缆的使用寿命。
技术研发人员:刘江涛,蔡俊贤,刘国栋,张燕鑫,冯清川,汪博华
受保护的技术使用者:中建钢构股份有限公司
技术研发日:20230919
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!