一种大工作范围的机械臂组合调姿机构的制作方法
本技术涉及自动化装备,具体的说,是一种大工作范围的机械臂组合调姿机构。
背景技术:
1、随着工业化不断推进,工业生产中对机器人需求越来越大。很多工业产品在生成过程中需要全方位的对产品进行装配以及检测等工序,但由于生产空间的限制,其需要机器人必须具备足够大的工作范围及到位精度。虽然现有市场上有许多并联协作机械臂,但其工作范围及到位精度远不能满足产品的装配以及检测需求。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种大工作范围的机械臂组合调姿机构,通过调平机构可适应不平地面并精准调平为检测机构提供基准面,检测机构能检测机械臂末端夹持点的位置,便于进一步调整位置。
2、本实用新型解决上述技术问题的技术方案如下:包括工作台,所述工作台的底部设有调平机构,所述工作台上滑动设置有多个机械臂,所述工作台的竖直上方设有用于检测多个所述机械臂位置的检测机构。
3、有益效果是:
4、一、机械臂上滑动设置在工作台上,可以提高工作范围;
5、二、通过调平机构可适应不平地面并精准调平为检测机构提供基准面;
6、三、检测机构能检测机械臂末端夹持点的位置,便于进一步调整位置。
7、在上述技术方案的基础上,本实用新型还可以做如下改进。
8、进一步,所述调平机构包括四个螺旋升降机,四个所述螺旋升降机分别固定连接在所述工作台的四角底部,所述螺旋升降机的升降端竖直向下且连接有支撑脚。
9、采用上述进一步方案的有益效果是螺旋升降机能调整工作台的高度,便于适应不平地面。
10、进一步,所述调平机构还包括倾角仪,所述倾角仪设置在所述工作台的底部。
11、采用上述进一步方案的有益效果是倾角仪能准确测量工作台是否发生倾斜。
12、进一步,所述螺旋升降机通过升降机安装架固定在所述工作台上。
13、采用上述进一步方案的有益效果是便于安装和拆卸螺旋升降机,保证螺旋升降机运行过程中的稳定。
14、进一步,所述检测机构包括固定架,所述固定架上设有多个检测相机,多个所述检测相机与多个所述机械臂一一对应设置。
15、采用上述进一步方案的有益效果是检测相机可以检测机械臂末端夹持点的位置,当机械臂末端夹持点位置发生偏移时,便于调整到合适的工作位置。
16、进一步,所述工作台横向上平行且间隔设置有多个丝杆模组,多个所述丝杆模组上滑动设置有对应的所述机械臂。
17、采用上述进一步方案的有益效果是可使机械臂工作范围延伸,在极小空间内有多台机械臂可提供检测。
18、进一步,所述工作台上还设置双动子直线滑台,所述双动子直线滑台上滑动设置有两个所述机械臂。
19、采用上述进一步方案的有益效果是使用双动子直线滑台可满足两机械臂之间间距极小的调姿需求。
20、进一步,所述机械臂为六轴机械臂。
21、采用上述进一步方案的有益效果是响应时间快,动作迅速,速度快,位置调整精确度高。
技术特征:
1.一种大工作范围的机械臂组合调姿机构,其特征在于:包括工作台(5),所述工作台(5)的底部设有调平机构,所述工作台(5)上滑动设置有多个机械臂(10),所述工作台(5)的竖直上方设有用于检测多个所述机械臂(10)位置的检测机构。
2.根据权利要求1所述的一种大工作范围的机械臂组合调姿机构,其特征在于:所述调平机构包括四个螺旋升降机(1),四个所述螺旋升降机(1)分别固定连接在所述工作台(5)的四角底部,所述螺旋升降机(1)的升降端竖直向下且连接有支撑脚。
3.根据权利要求2所述的一种大工作范围的机械臂组合调姿机构,其特征在于:所述调平机构还包括倾角仪(3),所述倾角仪(3)设置在所述工作台(5)的底部。
4.根据权利要求2所述的一种大工作范围的机械臂组合调姿机构,其特征在于:所述螺旋升降机(1)通过升降机安装架(4)固定在所述工作台(5)上。
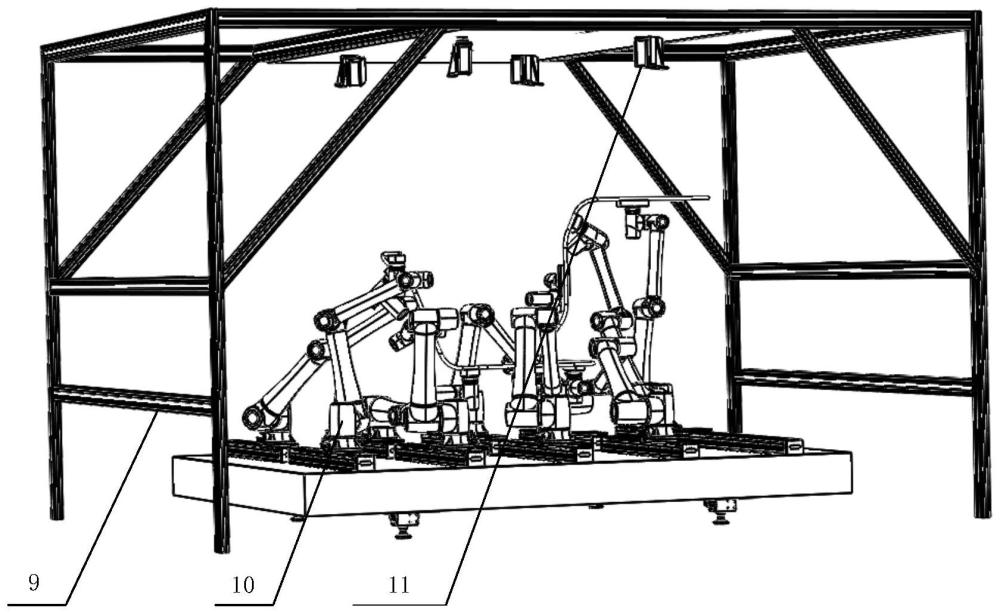
5.根据权利要求1所述的一种大工作范围的机械臂组合调姿机构,其特征在于:所述检测机构包括固定架(9),所述固定架(9)上设有多个检测相机(11),多个所述检测相机(11)与多个所述机械臂(10)一一对应设置。
6.根据权利要求5所述的一种大工作范围的机械臂组合调姿机构,其特征在于:所述工作台(5)横向上平行且间隔设置有多个丝杆模组(7),多个所述丝杆模组(7)上滑动设置有对应的所述机械臂(10)。
7.根据权利要求6所述的一种大工作范围的机械臂组合调姿机构,其特征在于:所述工作台(5)上还设置双动子直线滑台(8),所述双动子直线滑台(8)上滑动设置有两个所述机械臂(10)。
8.根据权利要求1-7任一项所述的一种大工作范围的机械臂组合调姿机构,其特征在于:所述机械臂(10)为六轴机械臂。
技术总结
本技术公开了一种大工作范围的机械臂组合调姿机构,包括工作台,所述工作台的底部设有调平机构,所述工作台上滑动设置有多个机械臂,所述工作台的竖直上方设有用于检测多个所述机械臂位置的检测机构。通过调平机构可适应不平地面并精准调平为检测机构提供基准面,检测机构能检测机械臂末端夹持点的位置,便于进一步调整位置。
技术研发人员:张轲,杨武林,詹刘振,孙传林,粟润
受保护的技术使用者:普达迪泰(成都)智造研究院有限公司
技术研发日:20230919
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!