一种减振球形机器人
本技术涉及机器人,尤其涉及一种减振球形机器人。
背景技术:
1、由于球形机器人具有良好的动态和静态平衡性,被广泛应用于探测、消防和娱乐等领域。现有的球形机器人多以单层球壳为主,即一层外球壳将内部控制系统与外部环境相隔离。此种单层球壳的机器人在执行指令时容易受外界环境变化的影响,对外界冲击的抵抗能力较差,不能很好的保护内部结构,导致使用时经常损坏和不能完成相应的操作。
技术实现思路
1、基于上述问题,本实用新型提供了一种减振球形机器人。
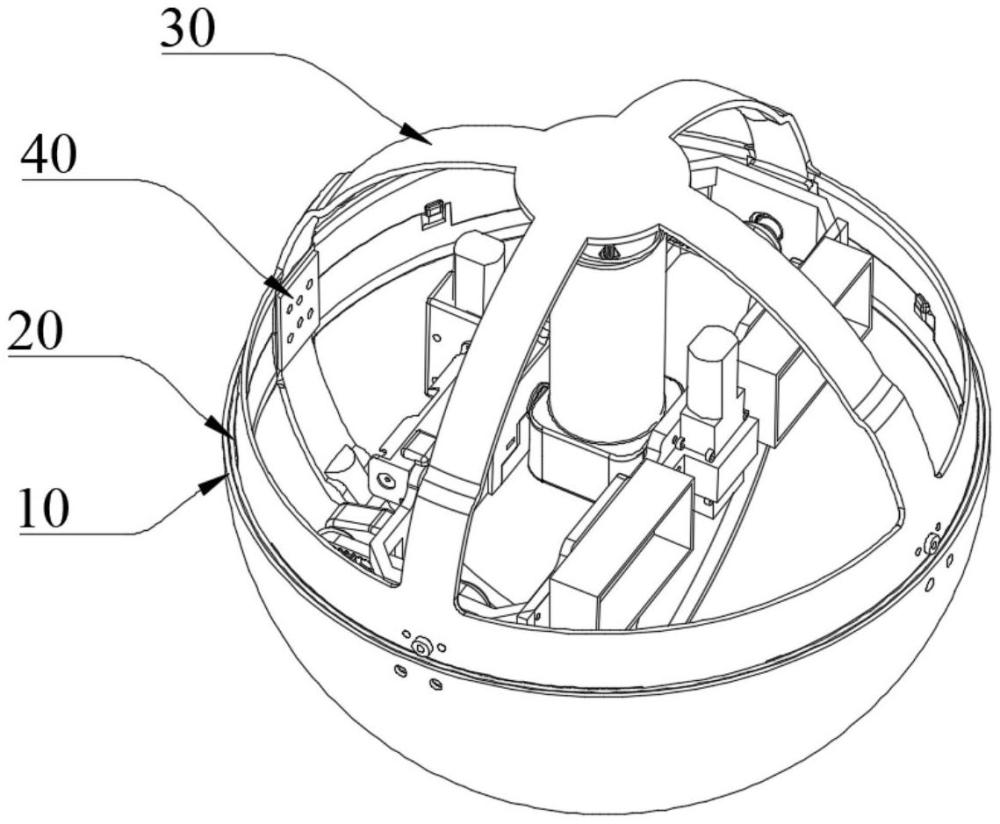
2、一种减振球形机器人,包括:外壳体、设置在外壳体内壁的缓冲层、设置在缓冲层内侧的球形支撑架以及设置在球形支撑架内部腔室中的定位框和动力组件;
3、定位框的中部转动设置有摆锤,摆锤的一侧设置有摆锤电机并通过摆锤电机驱动转动;
4、摆锤的另一侧设置有动力组件,动力组件与球形支撑架连接,通过动力组件带动球形支撑架及外壳体移动。
5、进一步地,上述动力组件包括驱动电机、电机延长杆、主动带轮、从动带轮与连轴法兰,驱动电机的输出轴通过联轴器与电机延长杆连接,电机延长杆的端部设置有主动带轮,从动带轮通过同步带与主动带轮同步转动,连轴法兰安装在从动带轮的外侧。
6、进一步地,上述定位框包括框本体及设置在框本体上的转轴安装座和电机安装座,转轴安装座与电机安装座设置在同一侧。
7、进一步地,上述框本体上设有传动孔与阶梯槽,通过传动孔安装连轴法兰,通过阶梯槽转动安装摆锤。
8、进一步地,上述电机延长杆上套设有滚珠轴承,滚珠轴承安装在转轴安装座上。
9、进一步地,上述摆锤的下端设置有配重块,摆锤的上端通过带颈法兰转动设置在阶梯槽上,带颈法兰与摆锤电机传动连接。
10、进一步地,上述带颈法兰上套设有内圈轴承和外圈轴承,内圈轴承、外圈轴承分别安装在阶梯槽的内侧和外侧,阶梯槽的上部设置有适配的阶梯盖板。
11、进一步地,上述球形支撑架包括上半体和下半体,上半体的圆周边缘上设有凹槽,下半体的圆周边缘上设有凸棱,凹槽与凸棱相适配,且上半体和下半体通过连接板连接固定。
12、进一步地,上述连接板上设有多个螺孔,连轴法兰通过螺钉与连接板连接。
13、进一步地,上述摆锤电机的两侧设置有电池仓,驱动电机的两侧设有电池槽。
14、本实用新型具有以下有益效果:本实用新型的球形机器人设置了外壳体-缓冲层-球形支撑架三重缓冲减振防护措施,可有效地抵御外部的冲击,保证内部部件的正常工作,避免内部部件的受损。
技术特征:
1.一种减振球形机器人,其特征在于,包括:外壳体(10)、设置在所述外壳体(10)内壁的缓冲层(20)、设置在所述缓冲层(20)内侧的球形支撑架(30)以及设置在球形支撑架(30)内部腔室中的定位框(50)和动力组件(70);
2.根据权利要求1所述的减振球形机器人,其特征在于:所述动力组件(70)包括驱动电机(701)、电机延长杆(702)、主动带轮(704)、从动带轮(706)与连轴法兰(707),所述驱动电机(701)的输出轴通过联轴器(703)与电机延长杆(702)连接,所述电机延长杆(702)的端部设置有主动带轮(704),所述从动带轮(706)通过同步带(705)与主动带轮(704)同步转动,所述连轴法兰(707)安装在所述从动带轮(706)的外侧。
3.根据权利要求2所述的减振球形机器人,其特征在于:所述定位框(50)包括框本体(501)及设置在框本体(501)上的转轴安装座(502)和电机安装座(503),所述转轴安装座(502)与电机安装座(503)设置在同一侧。
4.根据权利要求3所述的减振球形机器人,其特征在于:所述框本体(501)上设有传动孔(504)与阶梯槽(505),通过传动孔(504)安装所述连轴法兰(707),通过阶梯槽(505)转动安装所述摆锤(60)。
5.根据权利要求3所述的减振球形机器人,其特征在于:所述电机延长杆(702)上套设有滚珠轴承(708),所述滚珠轴承(708)安装在所述转轴安装座(502)上。
6.根据权利要求4所述的减振球形机器人,其特征在于:所述摆锤(60)的下端设置有配重块,所述摆锤(60)的上端通过带颈法兰(601)转动设置在阶梯槽(505)上,所述带颈法兰(601)与摆锤电机(604)传动连接。
7.根据权利要求6所述的减振球形机器人,其特征在于:所述带颈法兰(601)上套设有内圈轴承(602)和外圈轴承(603),所述内圈轴承(602)、外圈轴承(603)分别安装在阶梯槽(505)的内侧和外侧,所述阶梯槽(505)的上部设置有适配的阶梯盖板(506)。
8.根据权利要求2所述的减振球形机器人,其特征在于:所述球形支撑架(30)包括上半体和下半体,上半体的圆周边缘上设有凹槽,下半体的圆周边缘上设有凸棱,所述凹槽与凸棱相适配,且上半体和下半体通过连接板(40)连接固定。
9.根据权利要求8所述的减振球形机器人,其特征在于:所述连接板(40)上设有多个螺孔,所述连轴法兰(707)通过螺钉与所述连接板(40)连接。
10.根据权利要求2至9任一项所述的减振球形机器人,其特征在于:所述摆锤电机(604)的两侧设置有电池仓(606),所述驱动电机(701)的两侧设有电池槽(709)。
技术总结
本技术涉及机器人技术领域,公开了一种减振球形机器人,包括:外壳体、设置在外壳体内壁的缓冲层、设置在缓冲层内侧的球形支撑架以及设置在球形支撑架内部腔室中的定位框和动力组件;定位框的中部转动设置有摆锤,摆锤的一侧设置有摆锤电机并通过摆锤电机驱动转动,从而控制机器人的转向运动;摆锤的另一侧设置有动力组件,动力组件与球形支撑架连接,通过动力组件带动机器人进行前后运动。本技术的球形机器人设置了外壳体‑缓冲层‑球形支撑架三重缓冲减振防护措施,可有效地抵御外部的冲击,保证内部部件的正常工作,避免内部部件的受损。
技术研发人员:杨瑞林,吴迅,代茂琳,陆春妹,卢昱舟,孔祥宇,霍建文,张立红
受保护的技术使用者:西南科技大学
技术研发日:20230920
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!