往复式多刀剃刀的传动组件的制作方法
本技术涉及一种剃刀的传动组件,尤其是一种往复式多刀头剃刀的传动组件。
背景技术:
1、传统的电动剃须刀,尤其是往复式电动剃须刀,都是有利用电机经偏心轮偏心往复驱动驱动框振动,并通过驱动框上的驱动轴为往复动力传动至刀头。其具有偏心损失、电机负载大,振动频率无法得以提升,同时驱动框占用体积大,拆装复杂,使得整机无法迷你化,对清洁和维修带来一定的难度。尤其是对于多切割单元的刀头来说,一般采用一偏心轮带动多个驱动框来实现,多单元的驱动框一般为同向往复,从而形成多单元切割头的惯性震感叠加,具有噪声大、震动强烈等缺点。
技术实现思路
1、本实用新型提供一种同步性好、低噪、针对往复式多刀剃刀的传动组件。
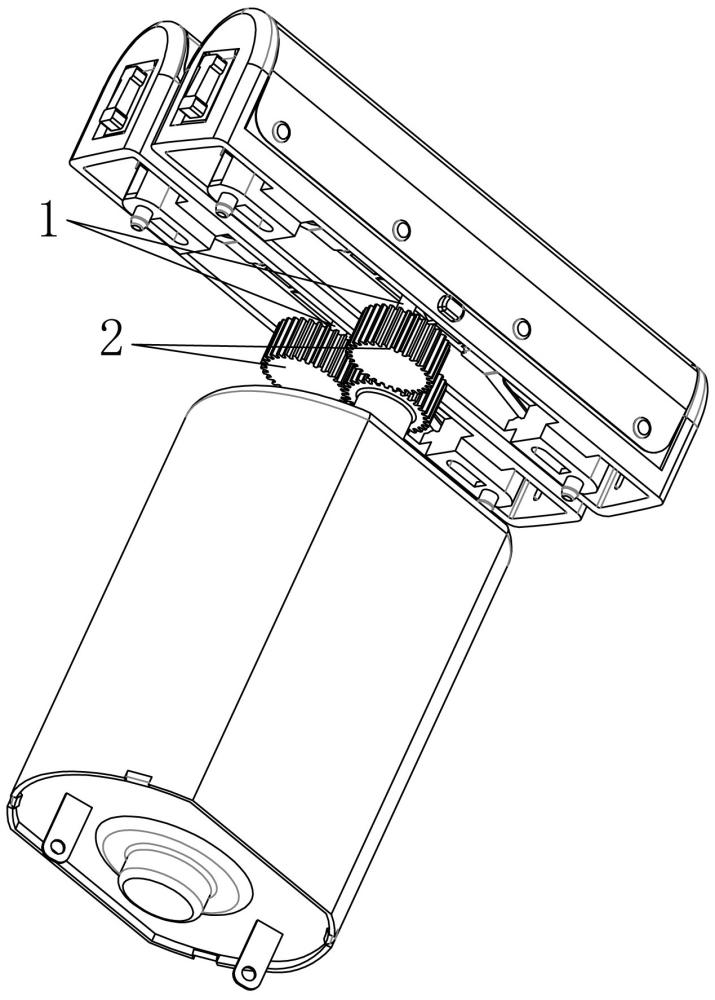
2、为解决上述技术问题,本实用新型采用以下技术方案:一种往复式多刀剃刀的传动组件,所述剃刀的刀头内带有一对或若干对往复式切割刀单元,每对往复式切割刀单元的下方均通过齿轮传动组件驱动,所述的齿轮传动组件包括分别于往复式切割刀单元连接的两偏心轴,两偏心轴的另一端分别偏心固接两同径的齿轮上,两齿轮外周上所带的啮合齿相同,两偏心轴在对应齿轮上的偏心位相同,两齿轮同步转动且运转方向相反。
3、作为一种改进:两齿轮为互不啮合的两从动轮,两从动轮分别由连接在电机轴上的主齿轮啮合带动,即两齿轮分别为第一从动轮和第二从动轮,第一从动轮和第二从动轮分别与主齿轮啮合,且两从动轮的中心至主齿轮中心的距离相等,第一从动轮和第二从动轮分别于主动轮两侧相对而设。
4、作为一种改进:两齿轮分别为中心连接在电机轴上的第一齿轮、与第一齿轮啮合且相对而设的第二齿轮,所述的第二齿轮由第一齿轮带动。
5、作为一种改进:两齿轮分别为一级从动轮和二级从动轮,一级从动轮和二级从动轮同向而设且相互啮合,所述的二级从动轮由一级从动轮带动,以及一级从动轮由连接在电机轴上的主齿轮啮合带动。
6、本实用新型提供的有益效果是:采用齿轮偏心直接带动切割单元,且直接偏心带动切割单元的齿轮成对设置,对内反向同步运转,从而使得对应对内的切割单元之间往复反向同频,惯性力相互抵消,有效降噪减震。对内的两齿轮为同设置的齿轮,同步性更佳,电机耗损小,电机电流稳定。本传动组件为直驱带动,可为无驱动框设置,大大缩小整机体积,为整机迷你化奠定基础。
7、下面结合附图和实施例对本实用新型作进一步详细介绍。
技术特征:
1.一种往复式多刀剃刀的传动组件,所述剃刀的刀头内带有一对或若干对往复式切割刀单元,每对往复式切割刀单元的下方均通过齿轮传动组件驱动,其特征在于:所述的齿轮传动组件包括分别于往复式切割刀单元连接的两偏心轴(1),两偏心轴(1)的另一端分别偏心固接两同径的齿轮(2)上,两齿轮(2)外周上所带的啮合齿相同,两偏心轴(1)在对应齿轮(2)上的偏心位相同,两齿轮同步转动且运转方向相反。
2.根据权利要求1所述的往复式多刀剃刀的传动组件,其特征在于:两齿轮(2)为互不啮合的两从动轮,两从动轮分别由连接在电机轴上的主齿轮(3)啮合带动,即两齿轮(2)分别为第一从动轮(21)和第二从动轮(22),第一从动轮(21)和第二从动轮(22)分别与主齿轮啮合,且两从动轮的中心至主齿轮(3)中心的距离相等,第一从动轮(21)和第二从动轮(22)分别于主动轮两侧相对而设。
3.根据权利要求1所述的往复式多刀剃刀的传动组件,其特征在于:两齿轮(2)分别为中心连接在电机轴上的第一齿轮(23)、与第一齿轮啮合且相对而设的第二齿轮(24),所述的第二齿轮(24)由第一齿轮(23)带动。
4.根据权利要求1所述的往复式多刀剃刀的传动组件,其特征在于:两齿轮分别为一级从动轮(25)和二级从动轮(26),一级从动轮(25)和二级从动轮(26)同向而设且相互啮合,所述的二级从动轮(26)由一级从动轮(25)带动,以及一级从动轮(25)由连接在电机轴上的主齿轮(3)啮合带动。
技术总结
本方案提供一种往复式多刀剃刀的传动组件,所述剃刀的刀头内带有一对或若干对往复式切割刀单元,每对往复式切割刀单元的下方均通过齿轮传动组件驱动,所述的齿轮传动组件包括分别于往复式切割刀单元连接的两偏心轴,两偏心轴的另一端分别偏心固接两同径的齿轮上,两齿轮外周上所带的啮合齿相同,两偏心轴在对应齿轮上的偏心位相同,两齿轮同步转动且运转方向相反。采用齿轮偏心直接带动切割单元,且直接偏心带动切割单元的齿轮成对设置,对内反向同步运转,从而使得对应对内的切割单元之间往复反向同频,惯性力相互抵消,有效降噪减震。对内的两齿轮为同设置的齿轮,同步性更佳,电机耗损小,电机电流稳定。
技术研发人员:金炳杰
受保护的技术使用者:浙江精博五金科技有限公司
技术研发日:20230928
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!