用于抓取行李的两指抓手的制作方法
本技术涉及机器人末端执行器,具体的是一种用于抓取行李的两指抓手。
背景技术:
1、随着经济的发展、人们对出行效率的需求逐渐提高,越来越多的机场、码头采用机器人对旅客的行李进行分拣。传统的机器人抓手大多采用平夹的方式对行李进行抓取,具体来说,机器人抓手包括一对平行设置的夹板,该对夹板在驱动机构的带动下平移,以实现抓手的打开和闭合,从而完成对行李的夹取和释放。
2、然而,旅客打包行李的方式多种多样,有采用质地较硬的行李箱进行打包,也有使用质地较软的行李包进行打包。上述平夹式抓手在抓取质地较硬且形状规则的行李箱时较为适用。但是,对于质地较软的行李包而言,由于行李包的形状会因其内所装的物品形状、数量的不同而出现不规则现象,因此,平夹式抓手在抓取不规则行李包时,很可能会因夹板与行李包接触面积过小而导致夹取可靠性不强,出现行李包掉落的可能。
技术实现思路
1、为了克服现有技术中的缺陷,本实用新型实施例提供了一种用于抓取行李的两指抓手,其用于解决上述问题。
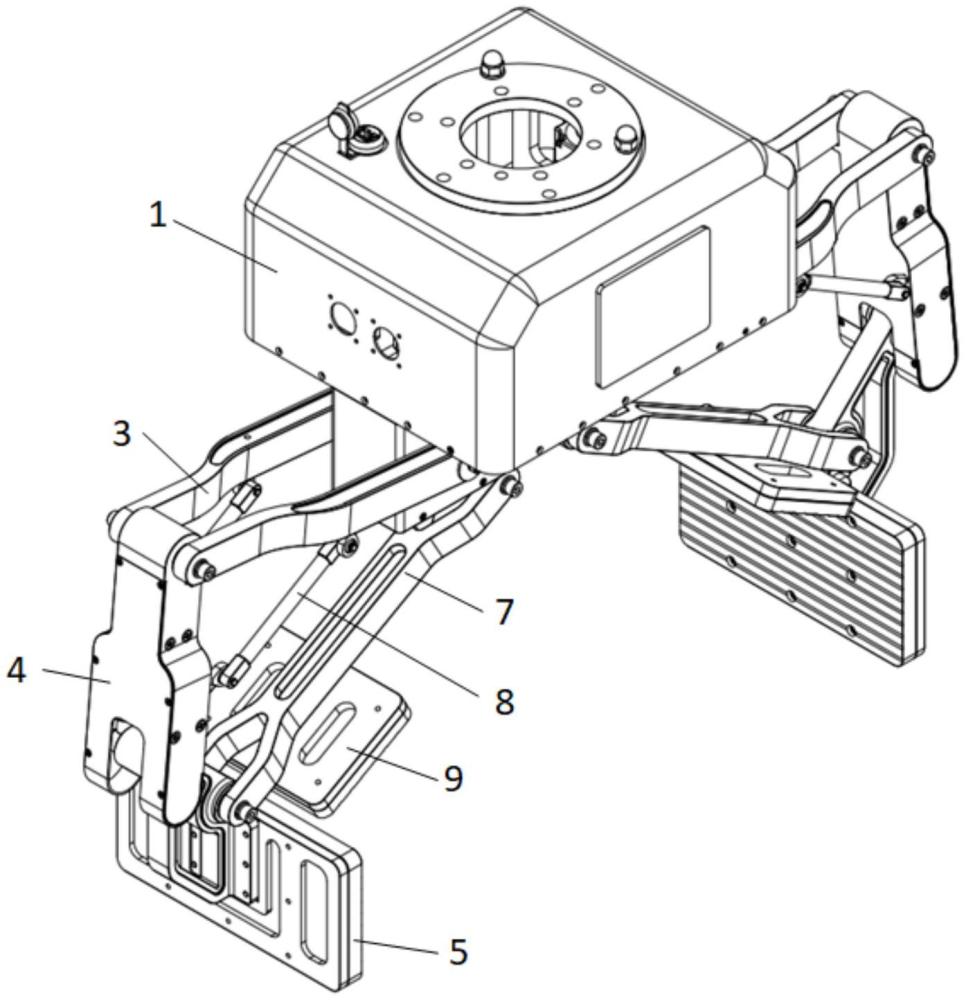
2、本申请实施例公开了:一种用于抓取行李的两指抓手,包括:
3、安装支架,用于与机器人末端连接;
4、两个第一驱动单元,安装于所述安装支架上;
5、两个驱动臂,分别与两个所述第一驱动单元的输出轴连接,每一所述驱动臂上铰接有一伸出臂,每一所述伸出臂上活动连接有夹持机构;
6、两个第二驱动单元,分别安装于两个所述伸出臂上,所述第二驱动单元用于驱动与之对应的伸出臂上的夹持机构运动;
7、两个从动臂,每一所述从动臂的一端与所述安装支架铰接、另一端与一个夹持机构铰接。
8、具体地,所述夹持机构包括与所述第二驱动单元连接的连接件和连接于所述连接件上的夹板,所述从动臂与所述连接件铰接。
9、具体地,所述伸出臂具有一容纳空间,所述第二驱动单元包括设置于所述容纳空间内的伺服电机、与所述伺服电机的输出轴连接的丝杆、连接于所述丝杆上的螺母以及与所述螺母连接的两个连接杆,所述连接件与两个所述连接杆连接。
10、具体地,所述驱动臂与所述伸出臂之间采用气弹簧连接,所述气弹簧的两端分别与所述驱动臂和所述伸出臂铰接。
11、具体地,所述从动臂朝向行李的一侧设有缓冲板。
12、具体地,所述缓冲板位于所述从动臂靠近所述夹持机构的一端。
13、具体地,所述第一驱动单元为带减速器电机。
14、本实用新型至少具有如下有益效果:本方案的用于抓取行李的两指抓手,通过第一驱动单元驱动夹板对行李箱进行平夹,该抓取方式简单易实现;通过第一驱动单元和第二驱动单元共同驱动夹板对行李包进行包络式抓取,该抓取方式可靠、行李包不易掉落。
15、为让本实用新型的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
技术特征:
1.一种用于抓取行李的两指抓手,其特征在于,包括:
2.根据权利要求1所述的用于抓取行李的两指抓手,其特征在于,所述夹持机构包括与所述第二驱动单元连接的连接件和连接于所述连接件上的夹板,所述从动臂与所述连接件铰接。
3.根据权利要求2所述的用于抓取行李的两指抓手,其特征在于,所述伸出臂具有一容纳空间,所述第二驱动单元包括设置于所述容纳空间内的伺服电机、与所述伺服电机的输出轴连接的丝杆、连接于所述丝杆上的螺母以及与所述螺母连接的两个连接杆,所述连接件与两个所述连接杆连接。
4.根据权利要求1所述的用于抓取行李的两指抓手,其特征在于,所述驱动臂与所述伸出臂之间采用气弹簧连接,所述气弹簧的两端分别与所述驱动臂和所述伸出臂铰接。
5.根据权利要求1所述的用于抓取行李的两指抓手,其特征在于,所述从动臂朝向行李的一侧设有缓冲板。
6.根据权利要求5所述的用于抓取行李的两指抓手,其特征在于,所述缓冲板位于所述从动臂靠近所述夹持机构的一端。
7.根据权利要求1所述的用于抓取行李的两指抓手,其特征在于,所述第一驱动单元为带减速器电机。
技术总结
本技术公开了一种用于抓取行李的两指抓手,包括:安装支架,用于与机器人末端连接;两个第一驱动单元,安装于所述安装支架上;两个驱动臂,分别与两个所述第一驱动单元的输出轴连接,每一所述驱动臂上铰接有一伸出臂,每一所述伸出臂上活动连接有夹持机构;两个第二驱动单元,分别安装于两个所述伸出臂上,所述第二驱动单元用于驱动与之对应的伸出臂上的夹持机构运动;两个从动臂,每一所述从动臂的一端与所述安装支架铰接、另一端与一个夹持机构铰接。本方案能可靠抓取行李箱和行李包,避免抓取过程中行李掉落。
技术研发人员:白国超,陈如仲,王盟,黄加杏
受保护的技术使用者:知行智能装备(盐城)有限公司
技术研发日:20231011
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!