一种双工位作业的激光加工机器人的制作方法
本技术涉及激光加工机器人,具体地说,涉及一种双工位作业的激光加工机器人。
背景技术:
1、激光加工机器人是将机器人技术应用于激光加工中,通过高精度工业机器人实现更加柔性的激光加工作业,本系统通过示教盒进行在线操作,也可通过离线方式进行编程,该系统通过对加工工件的自动检测,产生加工件的模型,继而生成加工曲线,也可以利用cad数据直接加工。
2、现在为了加快生产进度,推用了双工作位机器人,但是现有的双工位机器人在安装时稳定性较差,同时在使用时不方便对其位置进行调节,导致其在使用时存在局限性,从而降低了激光加工机器人的实用性。
技术实现思路
1、针对现有技术的不足,本实用新型的目的在于提供一种双工位作业的激光加工机器人,具备安装方便且便于调节的优点,解决了现有的双工位机器人在安装时稳定性较差,同时在使用时不方便对其位置进行调节,导致其在使用时存在局限性,从而降低了激光加工机器人的实用性。
2、本为实现上述目的,本实用新型提供如下技术方案,一种双工位作业的激光加工机器人所采用的技术方案是:包括双工位台本体,所述双工位台本体顶部的中心处固定安装有固定隔块,所述固定隔块表面设置有安装套,所述安装套的内部开设有第一滑槽,所述第一滑槽的内部滑动连接有第一滑块,所述第一滑块的顶部固定安装有定位板,所述定位板的顶部固定安装有定位柱,所述定位柱的顶部固定安装有固定杆,所述固定杆的两侧均固定安装有第二电机,所述安装套的正面固定安装有第一电机,所述安装套内腔的两侧均开设有螺纹槽,所述螺纹槽的内部转动连接有螺纹架,所述固定杆底部的两侧均开设有定位槽,所述定位槽的内部设置有螺纹套,所述螺纹套的底部固定安装有气缸,所述固定杆的内部且位于定位槽的顶部开设有第二滑槽,所述螺纹套的内部转动连接有第二螺纹杆,所述气缸的底部固定安装有激光头。
3、作为优选方案,所述第一滑块的内部转动连接有第一螺纹杆,所述第一电机的输出轴贯穿至第一滑槽的内腔与第一螺纹杆的正面固定连接。
4、作为优选方案,所述安装套内腔底部的两侧均固定安装有弹簧,所述弹簧的底部固定安装有卡板。
5、作为优选方案,所述卡板的底部与固定隔块的顶部接触,所述固定隔块的两侧均开设有卡槽。
6、作为优选方案,所述卡板顶部的中心处固定安装有阻尼器,所述阻尼器的顶部与安装套的内腔固定连接。
7、作为优选方案,所述螺纹架通过卡槽贯穿至固定隔块的内部,所述第二电机的输出轴贯穿至定位槽的内腔与第二螺纹杆相对远离的一侧固定连接。
8、作为优选方案,所述第二滑槽的内部滑动连接有第二滑块,所述第二滑块的底部与螺纹套的顶部固定连接。
9、与现有技术相比,本实用新型提供了一种双工位作业的激光加工机器人,具备以下有益效果。
10、1、该一种双工位作业的激光加工机器人,通过设置固定隔块便于对安装套进行定位,通过设置第一滑槽对第一滑块进行限位,防止第一滑块在移动的过程中发生晃动,通过设置第一滑块对定位板进行限位,防止定位板在移动的过程中发生晃动,通过设置定位板对定位柱进行限位,防止定位柱在移动的过程中发生晃动,通过设置定位柱对固定杆进行限位,通过设置固定杆对第二电机进行安装,通过设置定位槽对螺纹套进行限位,通过设置第二滑槽对第二滑块进行限位,防止第二滑块在移动的过程中发生晃动,通过设置气缸对激光头的位置进行调节,解决了现有的双工位机器人在安装时稳定性较差,同时在使用时不方便对其位置进行调节,导致其在使用时存在局限性,从而降低了激光加工机器人的实用性。
11、2、该一种双工位作业的激光加工机器人,通过设置第一电机对第一螺纹杆进行驱动,间接对第一滑块的位置进行调节,通过设置弹簧对卡板进行缓冲,通过设置卡槽便于对螺纹架的内侧进行固定,通过设置阻尼器对卡板进行阻尼,从而提高安装套的稳定性,防止其发生晃动,通过设置第二电机对第二螺纹杆进行驱动,间接对螺纹套的位置进行调节,通过设置第二滑块对螺纹套的顶部进行限位,防止螺纹套在移动的过程中发生晃动。
技术特征:
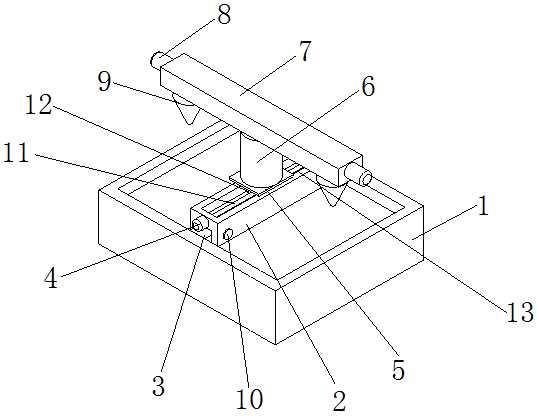
1.一种双工位作业的激光加工机器人,包括双工位台本体(1),其特征在于:所述双工位台本体(1)顶部的中心处固定安装有固定隔块(3),所述固定隔块(3)表面设置有安装套(2),所述安装套(2)的内部开设有第一滑槽(13),所述第一滑槽(13)的内部滑动连接有第一滑块(12),所述第一滑块(12)的顶部固定安装有定位板(5),所述定位板(5)的顶部固定安装有定位柱(6),所述定位柱(6)的顶部固定安装有固定杆(7),所述固定杆(7)的两侧均固定安装有第二电机(8),所述安装套(2)的正面固定安装有第一电机(4),所述安装套(2)内腔的两侧均开设有螺纹槽(24),所述螺纹槽(24)的内部转动连接有螺纹架(10),所述固定杆(7)底部的两侧均开设有定位槽(17),所述定位槽(17)的内部设置有螺纹套(20),所述螺纹套(20)的底部固定安装有气缸(22),所述固定杆(7)的内部且位于定位槽(17)的顶部开设有第二滑槽(19),所述螺纹套(20)的内部转动连接有第二螺纹杆(21),所述气缸(22)的底部固定安装有激光头(9)。
2.根据权利要求1所述的一种双工位作业的激光加工机器人,其特征在于:所述第一滑块(12)的内部转动连接有第一螺纹杆(11),所述第一电机(4)的输出轴贯穿至第一滑槽(13)的内腔与第一螺纹杆(11)的正面固定连接。
3.根据权利要求1所述的一种双工位作业的激光加工机器人,其特征在于:所述安装套(2)内腔底部的两侧均固定安装有弹簧(14),所述弹簧(14)的底部固定安装有卡板(16)。
4.根据权利要求3所述的一种双工位作业的激光加工机器人,其特征在于:所述卡板(16)的底部与固定隔块(3)的顶部接触,所述固定隔块(3)的两侧均开设有卡槽(23)。
5.根据权利要求3所述的一种双工位作业的激光加工机器人,其特征在于:所述卡板(16)顶部的中心处固定安装有阻尼器(15),所述阻尼器(15)的顶部与安装套(2)的内腔固定连接。
6.根据权利要求1所述的一种双工位作业的激光加工机器人,其特征在于:所述螺纹架(10)通过卡槽(23)贯穿至固定隔块(3)的内部,所述第二电机(8)的输出轴贯穿至定位槽(17)的内腔与第二螺纹杆(21)相对远离的一侧固定连接。
7.根据权利要求1所述的一种双工位作业的激光加工机器人,其特征在于:所述第二滑槽(19)的内部滑动连接有第二滑块(18),所述第二滑块(18)的底部与螺纹套(20)的顶部固定连接。
技术总结
本技术公开了一种双工位作业的激光加工机器人,包括双工位台本体,所述双工位台本体顶部的中心处固定安装有固定隔块,所述固定隔块表面设置有安装套,所述安装套的内部开设有第一滑槽,所述第一滑槽的内部滑动连接有第一滑块,所述第一滑块的顶部固定安装有定位板,所述定位板的顶部固定安装有定位柱,所述定位柱的顶部固定安装有固定杆。本技术通过设置固定隔块便于对安装套进行定位,通过设置第一滑槽对第一滑块进行限位,防止第一滑块在移动的过程中发生晃动,通过设置第一滑块对定位板进行限位,防止定位板在移动的过程中发生晃动,通过设置定位板对定位柱进行限位,防止定位柱在移动的过程中发生晃动。
技术研发人员:钱英杰,杨东,吴磊
受保护的技术使用者:湖北省坪遵科技有限公司
技术研发日:20231209
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!