空间机器人末端舱外电连接器拆装工具的制作方法
本发明涉及载人航天,尤其涉及一种空间机器人末端舱外电连接器拆装工具。
背景技术:
1、根据空间站运营阶段舱外维修任务的规划,未来空间机器人和空间机械臂将代替或辅助航天员完成在轨组装、舱外设备维修维护、航天器捕获等复杂操作。常见的在轨维护任务包括舱外设备的更换维修及装配等,这往往涉及到表面电连接器的安装和拆卸,是一项具有较高要求的精细化、灵巧化的操作,对于空间机器人执行该项任务就需要配备专用的末端执行工具,通过标准接口与机器人末端相连接,由机器人末端提供动力输出,自主完成电连接器拆卸和安装操作。
2、当前利用机械臂和机器人进行机械或作业在工业领域生产流水线上已经有一定范围的应用,并且实现了较高程度的自动化,但大多集中在包装、转位、螺钉旋拧方面,且都是既定工位,操作对象的坐标位置明确且不变,不需要机械臂末端进行自主寻找、定位和对接的工作。相比之下空间站舱外设备电连接器拆装任务面临复杂的空间环境,专用工具与电连接器的对位受机器人机械臂末端晃动影响严重,会产生较大的位置误差。目前机械臂可提供给工具的动力输入为单一的转动,电连接器拆装要靠连续的夹紧拉拔动作完成,需要工具内部巧妙的机构设计来实现末端的复杂且精细化运动。目前空间站舱内乃至舱外安装拆卸电连接器都是由航天员手动操作完成,包括地面也没有为设备电连接器拆装设计的专用工具。
3、因此,面对未来空间任务和深空探测的潜在应用需求,亟需一种空间机器人末端舱外电连接器拆装工具。
技术实现思路
1、针对上述的缺陷,本发明的目的在于提供一种空间机器人末端舱外电连接器拆装工具,用于实现对舱外电连接器的柔顺拆卸和安装操作。
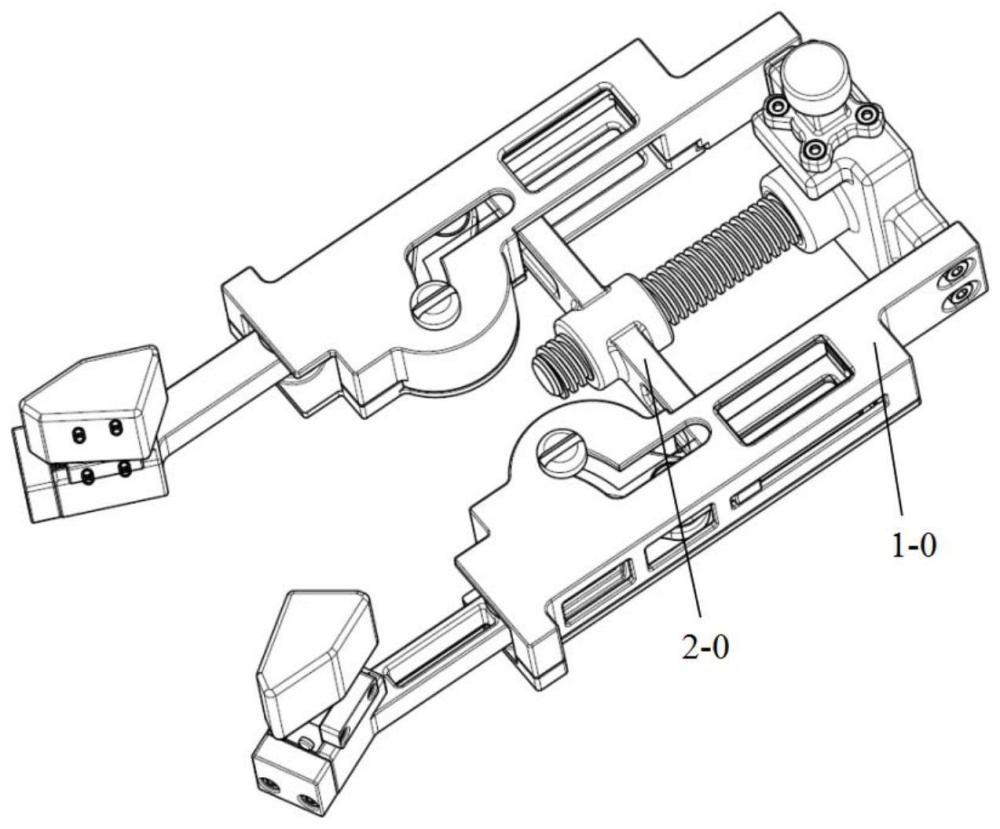
2、为了实现上述目的,本发明提供了一种空间机器人末端舱外电连接器拆装工具,包括有固定组件和拉杆组件,所述固定组件与一通用适配器固定连接,所述通用适配器用于与空间机器人机械臂末端对接;所述拉杆组件安装于所述固定组件上,且所述拉杆组件包括有传动模块和夹爪模块,所述传动模块与所述通用适配器的驱动轴连接以接收所述驱动轴的动力输入,所述夹爪模块与所述传动模块连接;其中,当所述传动模块接收到所述驱动轴的动力输入时,所述传动模块带动所述夹爪模块执行拆装操作,所述拆装操作包括所述夹爪模块末端的抓取动作和所述夹爪模块相对所述传动模块的伸缩动作。
3、可选的,所述固定组件包括端盖、主体框架和压盖,所述端盖的一端与所述通用适配器固定连接,所述主体框架设于所述端盖的另一端并与所述压盖安装固定,所述拉杆组件安装于所述主体框架上。
4、可选的,所述传动模块包括一螺杆、一螺母拉杆以及两个连接杆,所述螺杆的端面设有接口键槽,所述接口键槽与所述通用适配器的所述驱动轴连接;所述螺杆与所述螺母拉杆之间通过梯形螺纹配合安装,所述主体框架由相对的第一部件和第二部件构成,所述第一部件和所述第二部件上设有第一滑槽,所述螺母拉杆通过两端的凸台分别与所述第一部件和所述第二部件的所述第一滑槽组接;且所述螺母拉杆的两端分别通过轴销与两个所述连接杆组接。
5、可选的,所述夹爪模块包括有一对限位销钉、一对驱动柄、一对位置补偿装置以及一对夹块,所述连接杆的另一端通过所述限位销钉与所述驱动柄相连,所述限位销钉可滑动式限位于所述主体框架上的异形槽内,所述驱动柄的另一端通过所述位置补偿装置与所述夹块连接;所述驱动柄上设有一异形轴,所述异形轴安装于所述主体框架上的第二滑槽中;其中,当所述限位销钉在所述异形槽内以第一移动轨迹运动时,所述异形轴在所述第二滑槽中转动以使所述驱动柄末端的所述夹块作向内夹持运动;当所述限位销钉在所述异形槽内以第二移动轨迹运动时,所述异形轴沿着所述第二滑槽进行滑动以使所述驱动柄沿着所述第二滑槽的方向进行伸缩运动。
6、可选的,所述位置补偿装置包括有双向调节块、第一向滚轴、第二向滚轴、第一向弹簧和第二向弹簧组成,所述第一向滚轴和所述第二向滚轴分别安装于所述双向调节块相对垂直的两组轴孔内,且所述第一向弹簧和所述第二向弹簧分别安装于所述双向调节块相对垂直的两个端面上;所述驱动柄与所述夹块分别与所述双向调节块相对的两端活动式连接。
7、可选的,所述驱动柄与所述双向调节块之间为滑动式限位结构,所述夹块与所述双向调节块之间为滑动式限位结构。
8、可选的,所述固定组件还包括有通用芯,所述通用芯安装于所述端盖的侧面。
9、可选的,所述主体框架通过腰型孔与所述端盖连接固定。
10、本发明所述的空间机器人末端舱外电连接器拆装工具,包括有固定组件和拉杆组件,所述固定组件与一通用适配器固定连接,所述通用适配器用于与空间机器人机械臂末端对接;拉杆组件安装于所述固定组件上,且拉杆组件包括有传动模块和夹爪模块,传动模块与通用适配器的驱动轴连接以接收所述驱动轴的动力输入,夹爪模块与传动模块连接;其中,当传动模块接收到驱动轴的动力输入时,所述传动模块带动夹爪模块执行拆装操作,所述拆装操作包括夹爪模块末端的抓取动作和夹爪模块相对所述传动模块的伸缩动作。借此,本发明能够实现对舱外电连接器的柔顺拆卸和安装操作。
技术特征:
1.一种空间机器人末端舱外电连接器拆装工具,其特征在于,包括有固定组件和拉杆组件,所述固定组件与一通用适配器固定连接,所述通用适配器用于与空间机器人机械臂末端对接;所述拉杆组件安装于所述固定组件上,且所述拉杆组件包括有传动模块和夹爪模块,所述传动模块与所述通用适配器的驱动轴连接以接收所述驱动轴的动力输入,所述夹爪模块与所述传动模块连接;其中,当所述传动模块接收到所述驱动轴的动力输入时,所述传动模块带动所述夹爪模块执行拆装操作,所述拆装操作包括所述夹爪模块末端的抓取动作和所述夹爪模块相对所述传动模块的伸缩动作。
2.根据权利要求1所述的空间机器人末端舱外电连接器拆装工具,其特征在于,所述固定组件包括端盖、主体框架和压盖,所述端盖的一端与所述通用适配器固定连接,所述主体框架设于所述端盖的另一端并与所述压盖安装固定,所述拉杆组件安装于所述主体框架上。
3.根据权利要求2所述的空间机器人末端舱外电连接器拆装工具,其特征在于,所述传动模块包括一螺杆、一螺母拉杆以及两个连接杆,所述螺杆的端面设有接口键槽,所述接口键槽与所述通用适配器的所述驱动轴连接;所述螺杆与所述螺母拉杆之间通过梯形螺纹配合安装,所述主体框架由相对的第一部件和第二部件构成,所述第一部件和所述第二部件上设有第一滑槽,所述螺母拉杆通过两端的凸台分别与所述第一部件和所述第二部件的所述第一滑槽组接;且所述螺母拉杆的两端分别通过轴销与两个所述连接杆组接。
4.根据权利要求3所述的空间机器人末端舱外电连接器拆装工具,其特征在于,所述夹爪模块包括有一对限位销钉、一对驱动柄、一对位置补偿装置以及一对夹块,所述连接杆的另一端通过所述限位销钉与所述驱动柄相连,所述限位销钉可滑动式限位于所述主体框架上的异形槽内,所述驱动柄的另一端通过所述位置补偿装置与所述夹块连接;所述驱动柄上设有一异形轴,所述异形轴安装于所述主体框架上的第二滑槽中;其中,当所述限位销钉在所述异形槽内以第一移动轨迹运动时,所述异形轴在所述第二滑槽中转动以使所述驱动柄末端的所述夹块作向内夹持运动;当所述限位销钉在所述异形槽内以第二移动轨迹运动时,所述异形轴沿着所述第二滑槽进行滑动以使所述驱动柄沿着所述第二滑槽的方向进行伸缩运动。
5.根据权利要求4所述的空间机器人末端舱外电连接器拆装工具,其特征在于,所述位置补偿装置包括有双向调节块、第一向滚轴、第二向滚轴、第一向弹簧和第二向弹簧组成,所述第一向滚轴和所述第二向滚轴分别安装于所述双向调节块相对垂直的两组轴孔内,且所述第一向弹簧和所述第二向弹簧分别安装于所述双向调节块相对垂直的两个端面上;所述驱动柄与所述夹块分别与所述双向调节块相对的两端活动式连接。
6.根据权利要求5所述的空间机器人末端舱外电连接器拆装工具,其特征在于,所述驱动柄与所述双向调节块之间为滑动式限位结构,所述夹块与所述双向调节块之间为滑动式限位结构。
7.根据权利要求2所述的空间机器人末端舱外电连接器拆装工具,其特征在于,所述固定组件还包括有通用芯,所述通用芯安装于所述端盖的侧面。
8.根据权利要求2所述的空间机器人末端舱外电连接器拆装工具,其特征在于,所述主体框架通过腰型孔与所述端盖连接固定。
技术总结
本发明提供了一种空间机器人末端舱外电连接器拆装工具,包括有固定组件和拉杆组件,所述固定组件与一通用适配器固定连接,所述通用适配器用于与空间机器人机械臂末端对接;拉杆组件安装于所述固定组件上,且拉杆组件包括有传动模块和夹爪模块,传动模块与通用适配器的驱动轴连接以接收所述驱动轴的动力输入,夹爪模块与传动模块连接;其中,当传动模块接收到驱动轴的动力输入时,所述传动模块带动夹爪模块执行拆装操作,所述拆装操作包括夹爪模块末端的抓取动作和夹爪模块相对所述传动模块的伸缩动作。借此,本发明能够实现对舱外电连接器的柔顺拆卸和安装操作。
技术研发人员:杨佳鑫,郭涛,傅浩,刘俊良,唐赖颖,武婷婷,张一越,陈昊
受保护的技术使用者:北京卫星环境工程研究所
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!