一种单电机驱动的自适应外六角螺栓旋拧工具
本发明涉及一种外六角螺栓旋拧工具,具体涉及一种单电机驱动的自适应外六角螺栓旋拧工具,属于对螺栓拧紧拆卸领域。
背景技术:
1、外六角螺栓,是一种机械零件,由外六角头部和螺杆(带有外螺纹的圆柱体)两部分组成的一类紧固件,常用于机械结构的连接。在机械的日常使用过程中,零件的磨损与老化成为不可避免的问题,在一些人类难以进行维修操作的特殊工作环境下,例如在太空环境中载人航天器出现部件损坏时需要航天员出仓进行维修作业,非载人航天器出现部件损坏时则需要载人航天器将其捕获后再有航天员出仓进行维修作业,对于航天员来说长时间出仓作业风险较大,采用机器人对需要更换零件的机械进行维修操作是十分必要的。
2、而目前机器人在面对不同规格的外六角螺栓旋拧时需要更换不同规格的工具,还需操作人员施加外力进行旋拧,即使是采用自动旋拧螺栓的工具,也需要更换不同规格的工具。尤其在特殊工作环境下,增加了机器人的工作难度,影响了机器人的操作速度。
3、现有的适用于机器人作业的外六角螺栓旋拧工具至少采用两个驱动机构来驱动体积较大且控制复杂,并且工具上未集成传感器,难以满足在复杂环境下的无人作业要求,并且与外六角螺栓之间接触面积较小,旋拧效果差,难以适应维修任务的要求。
4、综上所述,现有适用于机器人作业的外六角螺栓旋拧工具存在体积较大,控制难,无法适应复杂工作环境,与外六角螺栓之间接触面积小,旋拧不同规格外六角螺栓时需更换旋拧工具的问题。
技术实现思路
1、本发明的目的是为了解决现有适用于机器人作业的外六角螺栓旋拧工具存在体积较大,控制难,无法适应复杂工作环境,与外六角螺栓之间接触面积小,旋拧不同规格外六角螺栓时需更换旋拧工具的问题。进而提供一种单电机驱动的自适应外六角螺栓旋拧工具。
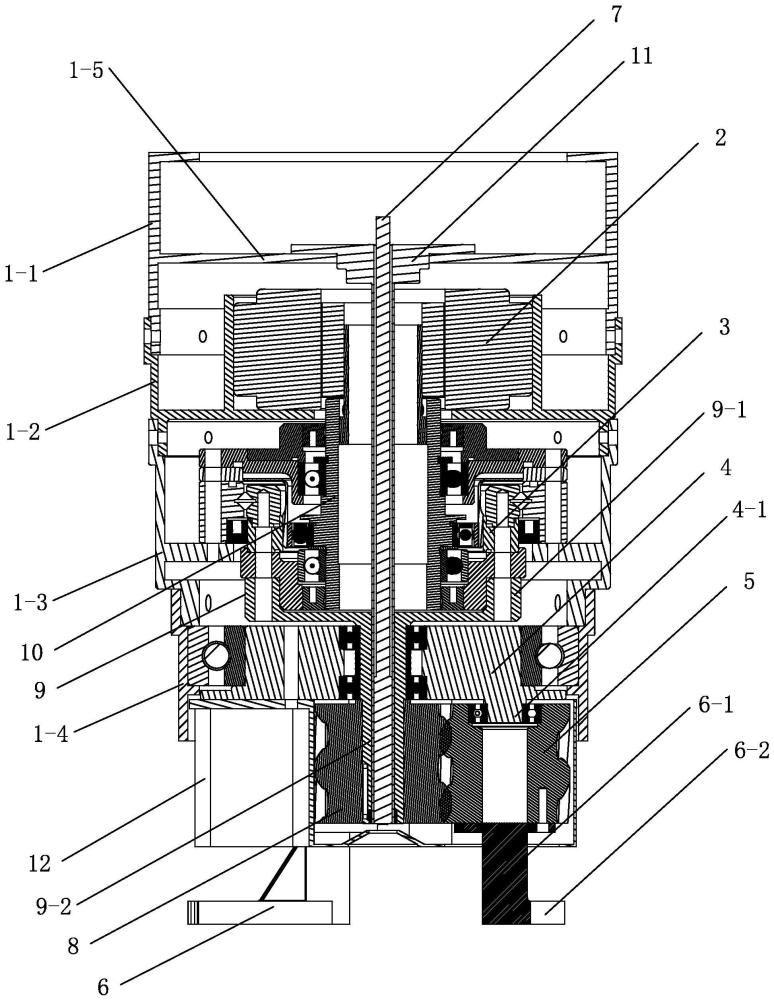
2、本发明的技术方案是:一种单电机驱动的自适应外六角螺栓旋拧工具,它包括外壳、无框电机、减速器、转盘、从动斜齿轮、夹爪、主动斜齿轮、主动法兰轴和无框电机输出轴,无框电机安装在外壳内,无框电机输出轴的上部与无框电机的转子固定连接,无框电机输出轴的下部与减速器的输入端固定连接,减速器的输出端法兰与主动法兰轴连接,转盘可转动套装在主动法兰轴上,主动斜齿轮固定套装在转盘下部的主动法兰轴上,夹爪固定安装在从动斜齿轮的下端,从动斜齿轮与主动斜齿轮啮合,无框电机转动带动从动斜齿轮及夹爪转动实现对螺栓的夹紧,夹紧螺栓后,相互啮合的斜齿轮能够自锁,螺栓不会从夹爪中松脱;当从动斜齿轮与主动斜齿轮啮合转动并将外六角螺栓夹紧时,从动斜齿轮与主动斜齿轮之间由于无法继续相对转动处于一体状态,此时,从动斜齿轮的上端与转盘的下端可相对转动连接,实现对外六角螺栓的拧紧或拧松。
3、进一步地,外壳包括第一壳体、第二壳体、第三壳体和第四壳体,第一壳体、第二壳体、第三壳体和第四壳体由上至下依次通过螺栓可拆卸连接。
4、优选地,第一壳体的内部加工有带有内孔的支撑台。
5、更进一步地,它还包括摄像头和摄像头外壳,摄像头外壳竖直插装在支撑台上,且摄像头外壳的下部向下延伸至主动法兰轴的下端面。
6、进一步地,转盘与主动法兰轴之间通过轴承转动连接,且转盘的下部设有三个凸台,所述凸台与从动斜齿轮的上部凹槽之间通过轴承转动连接。
7、更进一步地,夹爪包括竖直段和夹持条,竖直段的上部与从动斜齿轮通过螺栓连接,竖直段的下部与水平布置的夹持条固定连接并制成一体。
8、优选地,夹持条的两侧侧端面均为竖直平面。
9、进一步地,主动法兰轴包括上部法兰和轴体,上部法兰的上部为带有外沿凸起的圆盘形法兰,轴体与上部法兰的下端面中心固定连接并制成一体。
10、优选地,轴体为空心轴。
11、优选地,圆盘形法兰的外沿凸起在轴线方向开设有多个螺栓孔。
12、本发明与现有技术相比具有以下效果:
13、1、本发明结构简单,自适应能力强,由无框电机带动减速器驱动执行机构进行操作,体积更加小巧,整个传动过程简单,在制造和装配过程中,没有累积误差,传动灵敏,夹持条6-2的侧端面与外六角螺栓的其中三个端面进行夹持,接触面积大,且在夹持条6-2的作用下对不同规格的外六角螺栓的夹持和旋拧更加稳定,无需针对不同规格的外六角螺栓进行更换工具,在保证一定的旋拧力矩的同时相比于现有方案结构简单可靠性高。
14、2、本发明的控制简单,仅采用一个无框电机的单电机驱动方式,即可实现外六角螺栓的夹紧、松脱、拧紧、拧松四种操作,只需要通过控制无框电机的正反转和转动时长即可,整个控制过程简单、可靠。
15、3、由于本发明采用了夹爪6对外六角螺栓进行夹持,使得在夹持螺栓过程中,无需考虑螺栓的尺寸和规格,即可用于多种型号外六角螺栓的旋拧操作,适用范围广。
16、4、本发明的外六角螺栓旋拧工具上集成有摄像头,可与上位机通讯通过摄像头捕捉的位置信息实现对工具执行机构位置的调整,便于无人化操作,进而更加适用于在太空环境中载人航天器出现部件损坏时自动进行螺栓旋拧。
17、5、夹爪齿轮采用斜齿轮,夹紧螺栓后,由于斜齿轮能够自锁,当电机停止输出力矩时,夹爪的相互位置不会改变,螺栓将不会松脱。能够用于非磁性材料如钛合金制作的螺栓的旋拧。
技术特征:
1.一种单电机驱动的自适应外六角螺栓旋拧工具,其特征在于:它包括外壳(1)、无框电机(2)、减速器(3)、转盘(4)、从动斜齿轮(5)、夹爪(6)、主动斜齿轮(8)、主动法兰轴(9)和无框电机输出轴(10),
2.根据权利要求1所述的一种单电机驱动的自适应外六角螺栓旋拧工具,其特征在于:它还包括摄像头(7)和摄像头外壳(11),摄像头外壳(11)竖直插装在外壳(1)上的支撑台(1-5)上,且摄像头外壳(11)的下部向下延伸至主动法兰轴(9)的下端面,实现摄像头中心布局为控制系统提供目标螺栓位置信息。
3.根据权利要求2所述的一种单电机驱动的自适应外六角螺栓旋拧工具,其特征在于:转盘(4)与主动法兰轴(9)之间通过轴承转动连接,且转盘(4)的下部设有三个凸台(4-1),所述凸台(4-1)与从动斜齿轮(5)的上部凹槽之间通过轴承转动连接。
4.根据权利要求3所述的一种单电机驱动的自适应外六角螺栓旋拧工具,其特征在于:夹爪(6)包括竖直段(6-1)和夹持条(6-2),竖直段(6-1)的上部与从动斜齿轮(5)通过螺栓连接,竖直段(6-1)的下部与水平布置的夹持条(6-2)固定连接并制成一体。
5.根据权利要求4所述的一种单电机驱动的自适应外六角螺栓旋拧工具,其特征在于:夹持条(6-2)的两侧侧端面均为竖直平面。
6.根据权利要求1或5所述的一种单电机驱动的自适应外六角螺栓旋拧工具,其特征在于:主动法兰轴(9)包括上部法兰(9-1)和轴体(9-2),上部法兰(9-1)的上部为带有外沿凸起的圆盘形法兰,轴体(9-2)与上部法兰(9-1)的下端面中心固定连接并制成一体。
7.根据权利要求6所述的一种单电机驱动的自适应外六角螺栓旋拧工具,其特征在于:轴体(9-2)为空心轴。
技术总结
一种单电机驱动的自适应外六角螺栓旋拧工具,它涉及螺栓旋拧工具领域。本发明为了解决现有技术存在体积大,控制难,无法适应复杂工作环境,与螺栓接触面积小,无法适用不同规格螺栓旋拧的问题。无框电机安装在外壳内,无框电机输出轴与无框电机连接,无框电机输出轴与减速器连接,减速器与主动法兰轴连接,转盘套装在主动法兰轴上,主动斜齿轮固定套装在转盘下部的主动法兰轴上,夹爪固定安装在从动斜齿轮的下端,从动斜齿轮与主动斜齿轮啮合,当从动斜齿轮与主动斜齿轮啮合转动并将螺栓夹紧时为一体状态,此时,从动斜齿轮的上端与转盘的下端可相对转动连接,实现对外六角螺栓的拧紧或拧松。本发明用于对螺栓的旋拧。
技术研发人员:郭闯强,张朋浩,吴春亚,刘宏
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!