一种图书分拣辅助机器人的制作方法
本发明属于图书分拣设备,具体为一种图书分拣辅助机器人。
背景技术:
1、图书馆供人阅览、参考的机构,图书馆有保存人类文化遗产、开发信息资源、参与社会教育等职能,图书馆是社会知识、信息、文化的记忆装置、扩散装置。
2、工作人员在图书馆进行日常作业的时候,图书管理是较为重要的一项工作,目前大多数图书馆中的图书往往是由工作人员人工进行分拣整理,这些图书通常由工作人员根据种类与图书编号进行分类排序,随后依次放入至目标书架内部,此时若是书架层数较低操作人员可直接将图书放置于书架内部,但当遇到需要摆放至书架高层的图书时,此时工作人员就需要借助椅子、梯子等工具进行爬高作业,当工作人员手持图书进行爬高作业时,不但会出现图书掉落可能,严重时还可能会出现工作人员从梯子上摔落情况,工作效率不高的同时可能对工作人员造成危险,给工作人员的作业使用带来了不便,因此需要对其进行改进。
技术实现思路
1、本发明的目的在于提供一种图书分拣辅助机器人,以解决上述背景技术中提出的问题。
2、为了实现上述目的,本发明提供如下技术方案:一种图书分拣辅助机器人,包括有:
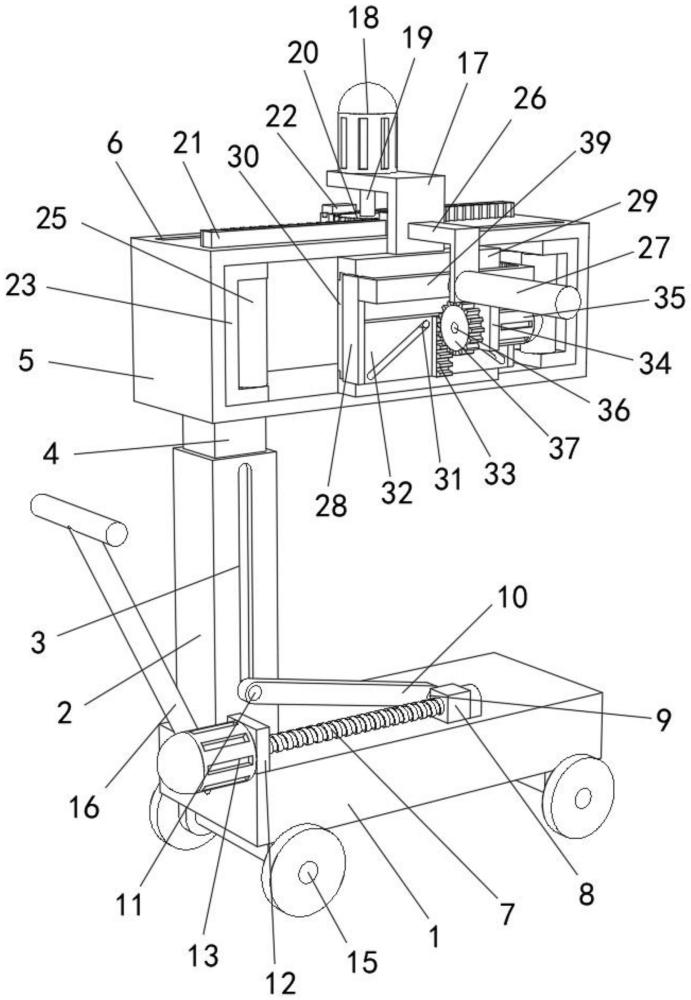
3、底座,所述底座顶端的左侧固定安装有固定柱,所述固定柱的正面开设有竖槽,所述固定柱的内部活动套接有升降柱,所述升降柱的顶端固定安装有升降箱,所述升降箱顶端的前后两侧均开设有横槽;
4、驱动机构,所述驱动机构设置在底座顶端左侧的前方;
5、升降机构,所述升降机构设置在底座的顶端;
6、其中,所述升降机构包括有丝杠,所述丝杠的右侧与底座顶端的外表面活动连接,所述丝杠的外表面螺纹套接有运动块,所述运动块的底端与底座的顶端活动连接,所述运动块的背面固定安装有运动轴,所述运动轴的外表面活动套接有运动杆,所述运动杆另一端的内部活动套接有升降轴,所述升降轴的另一端通过竖槽延伸至固定柱的内部,所述竖槽的背面与升降柱正面的底端固定连接,丝杠旋转使得运动块通过运动杆和升降轴推动升降柱向上。
7、优选地,所述驱动机构包括有:
8、固定板,所述固定板的底端与底座顶端左侧的前方固定连接;
9、驱动电机,所述驱动电机的右侧与固定板的左侧固定连接,所述驱动电机输出轴的另一端固定套接有旋转轴,所述旋转轴的另一端贯穿固定板的左侧并延伸至固定板的右侧,所述旋转轴的另一端与丝杠的左侧固定连接。
10、优选地,所述底座底端左侧与右侧的内部均活动安装有滚轮,所述底座的左侧固定安装有把手。
11、优选地,所述升降箱正面的顶端固定安装有第一支架,所述第一支架顶端的后方固定安装有第一动力电机,所述第一动力电机输出轴的另一端固定套接有转动轴,所述转动轴的另一端贯穿第一支架的顶端并延伸至第一支架的内部,所述转动轴的另一端与升降箱的顶端活动连接。
12、优选地,所述转动轴另一端的外表面固定套接有第一齿轮,所述第一齿轮的底端与升降箱的顶端活动连接,所述第一齿轮的外表面啮合连接有第一齿板,所述第一齿板的外表面活动连接有第一限位块,所述第一限位块的底端与升降箱的顶端固定连接,所述第一齿板另一端的底端固定安装有方形块,所述方形块的底端通过横槽延伸至升降箱的内部,所述方形块的底端固定安装有活动块,所述活动块的外表面与升降箱的内部活动连接。
13、优选地,所述活动块的内部固定安装有圆杆,所述圆杆的外表面活动套接有圆柱,所述圆柱的底端与顶端均与活动块的内部活动连接。
14、优选地,所述第一支架的正面固定安装有第二支架,所述第二支架正面的底端固定安装有气压缸,所述气压缸的另一端贯穿第二支架的正面并延伸至第二支架的内部,所述气压缸的另一端固定安装有固定架,所述固定架背面的左右两端均固定安装有第二限位块,所述第二限位块的外表面固定安装有推板,所述推板正面的左右两侧均开设有短槽,所述推板背面左右两侧的内部均活动套接有运动板,所述运动板的背面固定安装有活动轴,所述活动轴的另一端通过短槽延伸至推板正面的前方。
15、优选地,所述第二限位块的内部活动连接有挤压板,所述挤压板的背面与推板的正面活动连接,所述挤压板的内部与活动轴的外表面活动连接,所述挤压板的正面固定安装有第二齿板。
16、优选地,所述第二限位块的正面固定安装有电机支架,所述电机支架的外表面固定安装有第二动力电机,所述第二动力电机输出轴的另一端固定套接有圆轴,所述圆轴的另一端贯穿电机支架的外表面并延伸至电机支架的左侧,所述圆轴的另一端固定套接有第二齿轮,所述第二齿轮的外表面与第二齿板的外表面啮合连接。
17、本发明的有益效果如下:
18、1、本发明通过设置丝杠、运动块、运动杆和驱动电机,当驱动电机运行时,此时旋转轴将带动丝杠进行旋转,这时丝杠将带动运动块进行运动,由于运动块的底端与底座的顶端相接触,此时运动块将带动运动轴在丝杠的带动下进行向左运动,与此同时运动轴将带动运动杆进行运动,这时运动杆的另一端将挤压推动升降轴进行运动,由于竖槽内部的设计,此时升降轴将带动升降柱在竖槽的限位下进行向上运动,随后升降柱将带动升降箱整体进行向上运动,从而实现了将图书抬升至较书架较高处的功能。
19、2、本发明通过设置第一动力电机、第一齿轮、第一齿板和活动块,当第一动力电机运行时,此时转动轴将带动第一齿轮进行旋转,此时两个第一齿板将在第一齿轮的带动下进行运动,由于两个第一限位块的限位作用,此时两个第一齿板将通过两个方形块带动两个活动块在升降箱的内部进行相向运动,紧接着两个活动块将通过八个圆杆带动八个圆柱进行相向运动,此时位于升降箱内部的图书将在八个圆柱的相向运动中被夹紧,从而实现了自动固定升降箱内部图书的功能,方便了工作人员的作业使用。
20、3、本发明通过设置运动板、挤压板、第二齿板和第二齿轮,当第二动力电机运动时,此时圆轴将带动第二齿轮进行旋转,这时第二齿轮将通过第二齿板带动挤压板进行运动,由于两个第二限位块内部的限位作用,此时挤压板将沿着两个第二限位块的内部进行向上运动,由于挤压板左右两侧内部的设计,当挤压板向上运动时其左右两侧的内部将分别挤压推动两个活动轴进行相背运动,这时两个活动轴将分别带动两个运动板在推板的内部进行相背运动,从而实现了根据图书数量调整推板推动面积的功能。
技术特征:
1.一种图书分拣辅助机器人,其特征在于,包括有:
2.根据权利要求1所述的一种图书分拣辅助机器人,其特征在于:所述驱动机构包括有:
3.根据权利要求1所述的一种图书分拣辅助机器人,其特征在于:所述底座(1)底端左侧与右侧的内部均活动安装有滚轮(15),所述底座(1)的左侧固定安装有把手(16)。
4.根据权利要求1所述的一种图书分拣辅助机器人,其特征在于:所述升降箱(5)正面的顶端固定安装有第一支架(17),所述第一支架(17)顶端的后方固定安装有第一动力电机(18),所述第一动力电机(18)输出轴的另一端固定套接有转动轴(19),所述转动轴(19)的另一端贯穿第一支架(17)的顶端并延伸至第一支架(17)的内部,所述转动轴(19)的另一端与升降箱(5)的顶端活动连接。
5.根据权利要求4所述的一种图书分拣辅助机器人,其特征在于:所述转动轴(19)另一端的外表面固定套接有第一齿轮(20),所述第一齿轮(20)的底端与升降箱(5)的顶端活动连接,所述第一齿轮(20)的外表面啮合连接有第一齿板(21),所述第一齿板(21)的外表面活动连接有第一限位块(22),所述第一限位块(22)的底端与升降箱(5)的顶端固定连接,所述第一齿板(21)另一端的底端固定安装有方形块(38),所述方形块(38)的底端通过横槽(6)延伸至升降箱(5)的内部,所述方形块(38)的底端固定安装有活动块(23),所述活动块(23)的外表面与升降箱(5)的内部活动连接。
6.根据权利要求5所述的一种图书分拣辅助机器人,其特征在于:所述活动块(23)的内部固定安装有圆杆(24),所述圆杆(24)的外表面活动套接有圆柱(25),所述圆柱(25)的底端与顶端均与活动块(23)的内部活动连接。
7.根据权利要求4所述的一种图书分拣辅助机器人,其特征在于:所述第一支架(17)的正面固定安装有第二支架(26),所述第二支架(26)正面的底端固定安装有气压缸(27),所述气压缸(27)的另一端贯穿第二支架(26)的正面并延伸至第二支架(26)的内部,所述气压缸(27)的另一端固定安装有固定架(39),所述固定架(39)背面的左右两端均固定安装有第二限位块(28),所述第二限位块(28)的外表面固定安装有推板(29),所述推板(29)正面的左右两侧均开设有短槽(40),所述推板(29)背面左右两侧的内部均活动套接有运动板(30),所述运动板(30)的背面固定安装有活动轴(31),所述活动轴(31)的另一端通过短槽(40)延伸至推板(29)正面的前方。
8.根据权利要求7所述的一种图书分拣辅助机器人,其特征在于:所述第二限位块(28)的内部活动连接有挤压板(32),所述挤压板(32)的背面与推板(29)的正面活动连接,所述挤压板(32)的内部与活动轴(31)的外表面活动连接,所述挤压板(32)的正面固定安装有第二齿板(33)。
9.根据权利要求7所述的一种图书分拣辅助机器人,其特征在于:所述第二限位块(28)的正面固定安装有电机支架(34),所述电机支架(34)的外表面固定安装有第二动力电机(35),所述第二动力电机(35)输出轴的另一端固定套接有圆轴(36),所述圆轴(36)的另一端贯穿电机支架(34)的外表面并延伸至电机支架(34)的左侧,所述圆轴(36)的另一端固定套接有第二齿轮(37),所述第二齿轮(37)的外表面与第二齿板(33)的外表面啮合连接。
技术总结
本发明属于图书分拣设备技术领域,且公开了一种图书分拣辅助机器人,包括有:底座,所述底座顶端的左侧固定安装有固定柱。本发明通过设置丝杠、运动块、运动杆和驱动电机,当驱动电机运行时,此时旋转轴将带动丝杠进行旋转,这时丝杠将带动运动块进行运动,由于运动块的底端与底座的顶端相接触,此时运动块将带动运动轴在丝杠的带动下进行向左运动,与此同时运动轴将带动运动杆进行运动,这时运动杆的另一端将挤压推动升降轴进行运动,由于竖槽内部的设计,此时升降轴将带动升降柱在竖槽的限位下进行向上运动,随后升降柱将带动升降箱整体进行向上运动,从而实现了将图书抬升至较书架较高处的功能。
技术研发人员:李开梅
受保护的技术使用者:陕西艺和华书科技有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!