一种机器人精准定位方法、系统、设备和介质与流程
本申请涉及精准定位,尤其涉及一种机器人精准定位方法、系统、设备和介质。
背景技术:
1、随着新能源汽车的普及,如何有效的为能量不足的车辆提供快速有效的能量补给成为车主和各大厂商非常关注的问题。以新能源重卡为例,当前主流的电能补给方案包括电池更换方案。电池更换方案一般在充换电站内完成,充换电站内设置有用于为新能源重卡更换电池的换电平台和用于存放电池的电池仓,以及在电池仓和换电平台之间运载电池的换电机器人。
2、换电机器人有三个自由度,分别为x,y,z三个方向,以达到对不同仓位电池的抓取及放置,换电机器人通过程序中规划好的轨迹在电池仓和换电平台之间往复行驶,完成为停于换电平台上的新能源重卡更换电池的动作。
3、换电过程中,换电机器人需要将车辆的亏电电池运输到电池仓中进行存储,并将电池仓中的满电电池运送到换电平台,并放置在车辆上。
4、换电过程中需要对电池准确的抓取,如果机器人在运行的过程中出现打滑,会导致定位不准,进而影响对电池的抓取。
5、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、鉴于现有技术的上述缺点、不足,本发明提供一种机器人精准定位方法、系统、设备和介质,以克服现有技术中换电机器人在运送电池的过程中,由于轨道高低不平,或者由于换电机器人运行速度快,但是换电机器人自重较轻,容易出现打滑的情况,使得换电机器人达到定位位置时,出现偏差得问题。
2、本发明至少包括以下几个方面:
3、第一方面,本发明提供了一种机器人精准定位方法,包括:
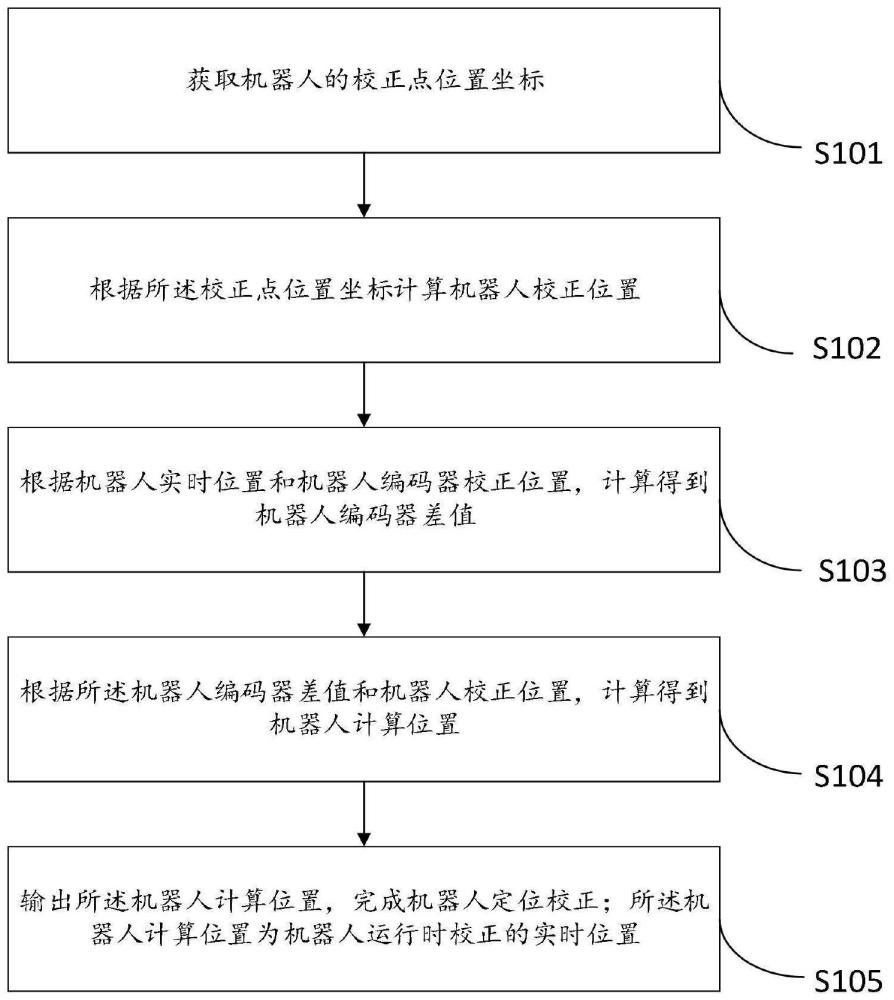
4、获取机器人的校正点位置坐标;
5、根据所述校正点位置坐标计算机器人校正位置;
6、根据机器人实时位置和机器人编码器校正位置,计算得到机器人编码器差值;
7、根据所述机器人编码器差值和机器人校正位置,计算得到机器人计算位置;
8、输出所述机器人计算位置,完成机器人定位校正;所述机器人计算位置为机器人运行时校正的实时位置。
9、在本发明的一个实施例中,所述校正点位置坐标包括第一校正点位置坐标和第二校正点位置坐标。
10、在本发明的一个实施例中,所述机器人实时位置等于机器人编码器位置与补偿值的加和。
11、在本发明的一个实施例中,所述补偿值设置在50-100mm的范围内,以避免所述机器人实时位置变为负值。
12、在本发明的一个实施例中,所述机器人编码器差值为所述机器人实时位置与所述机器人编码器校正位置的差值。
13、在本发明得一个实施例中,所述机器人计算位置为所述机器人编码器差值与所述机器人校正位置的加和。
14、第二方面,本发明提供了一种机器人精准定位系统,应用于上述实施例中任一项所述的机器人精准定位方法,包括:
15、采集模块,用于获取机器人的校正点位置坐标;所述校正点位置坐标包括第一校正点位置坐标和第二校正点位置坐标;
16、计算模块,用于根据所述校正点位置坐标计算机器人校正位置;根据机器人实时位置和机器人编码器校正位置,计算得到机器人编码器差值;根据所述机器人编码器差值和机器人校正位置,计算得到机器人计算位置;
17、输出模块,用于输出所述机器人计算位置,完成机器人定位校正;所述机器人计算位置为机器人运行时校正的实时位置。
18、在本发明的一个实施例中,所述计算模块中:
19、所述机器人实时位置等于机器人编码器位置与补偿值的加和;所述补偿值设置在50-100mm的范围内,以避免所述机器人实时位置变为负值;
20、所述机器人编码器差值为所述机器人实时位置与所述机器人编码器校正位置的差值;
21、所述机器人计算位置为所述机器人编码器差值与所述机器人校正位置的加和。
22、第三方面,本发明提供了一种电子设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过所述总线进行通信,所述机器可读指令被所述处理器运行时执行如上述实施例中任一所述机器人精准定位方法的步骤。
23、第四方面,本发明提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如上述实施例中任一所述机器人精准定位方法的步骤。
24、本发明的上述技术方案相比现有技术具有以下优点:
25、本发明所述的一种机器人精准定位方法、系统、设备和介质,通过换电机器人在预定轨道上来回行走抓取和运输电池,在预定轨道得校正位置上获取机器人编码器校正位置和机器人校正位置,并在机器人运行时计算机器人编码器差值和机器人计算位置,对机器人运行进行实时位置校正。其方法简单,且不限制实现其方法使用得具体硬件芯片以及传感器型号,实现成本低。
技术特征:
1.一种机器人精准定位方法,其特征在于,包括:
2.根据权利要求1所述的机器人精准定位方法,其特征在于,所述校正点位置坐标包括第一校正点位置坐标和第二校正点位置坐标。
3.根据权利要求1所述的机器人精准定位方法,其特征在于,所述机器人实时位置等于机器人编码器位置与补偿值的加和。
4.根据权利要求3所述的机器人精准定位方法,其特征在于,所述补偿值设置在50-100mm的范围内,以避免所述机器人实时位置变为负值。
5.根据权利要求1所述的机器人精准定位方法,其特征在于,所述机器人编码器差值为所述机器人实时位置与所述机器人编码器校正位置的差值。
6.根据权利要求1所述的机器人精准定位方法,其特征在于,所述机器人计算位置为所述机器人编码器差值与所述机器人校正位置的加和。
7.一种机器人精准定位系统,应用于上述权利要求1-6任一项所述的机器人精准定位方法,其特征在于,包括:
8.根据权利要求7所述的机器人精准定位系统,其特征在于,所述计算模块中:
9.一种电子设备,其特征在于,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过所述总线进行通信,所述机器可读指令被所述处理器运行时执行如权利要求1至6任一所述机器人精准定位方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如权利要求1至6任一所述机器人精准定位方法的步骤。
技术总结
本申请涉及精准定位技术领域,具体提供一种机器人精准定位方法、系统、设备和介质,其通过获取机器人的校正点位置坐标;根据校正点位置坐标计算机器人校正位置;根据机器人实时位置和机器人编码器校正位置,计算得到机器人编码器差值;根据机器人编码器差值和机器人校正位置,计算得到机器人计算位置;输出所述机器人计算位置,完成机器人定位校正。本申请通过换电机器人在预定轨道上来回行走抓取和运输电池,在预定轨道得校正位置上获取机器人编码器校正位置和机器人校正位置,并在机器人运行时计算机器人编码器差值和机器人计算位置,对机器人运行进行实时位置校正,其实现方法使用的具体硬件芯片以及传感器型号不受限制,实现成本低。
技术研发人员:丁明波,傅明君,刘志文,侯孙海
受保护的技术使用者:上海绿电湾能源科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!