一种基于自适应步长更新的路径避障方法
本发明属于移动设备避障,具体涉及一种基于自适应步长更新的路径避障方法。
背景技术:
1、随着现代科技不断进步,机器人将越来越智能,可以代替人完成一些重复性的工作,机械臂是一种典型的机器人类型。在实际应用过程中,机械臂需要灵活、快速、准确地避开障碍物,到达目标点。这样就需要机械臂能够高效、自主避障,可以在复杂障碍物环境快速选择出一条质量高的无碰撞的路径。
2、rrt算法是一种基于随机采样的算法,通过在空间随机采样进行路径规划,一直采样到结束或者到达目标点。计算简单、搜索速度快等优点,尤其在高维度下,效果更加明显。所以rrt算法可以广泛应用于各种机器人的路径规划中。但是rrt算法存在采样次数多、过度离散、冗余节点多等缺点。
技术实现思路
1、为了解决采样次数多、过度离散、冗余节点多等缺点。本发明提供一种基于自适应步长更新的路径避障方法,在传统rrt算法中优化随机样本点的生成方式,使样本点尽量靠近目标点生成;根据生成样本点的位置生成自适应步长;根据随机树上最后一个节点位置确定不同的目标偏置概率来进行下一个样本点的生成。
2、第一方面,本发明提出一种基于自适应步长更新的路径避障方法,该方法包括以下步骤:
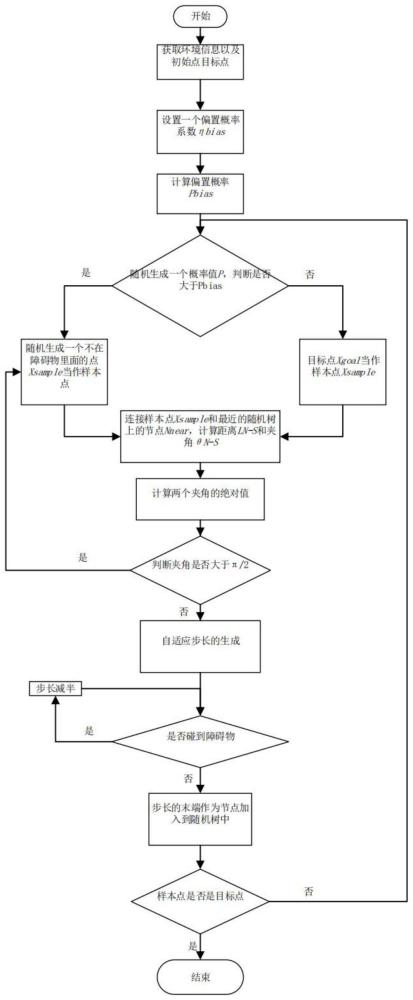
3、步骤一、获取移动物体周围的环境信息并构建坐标系。环境信息包括初始点xstart、障碍物和目标点xgoal的位置信息;计算初始点xstart和目标点xgoal之间的距离ls-g,以及初始点xstart和目标点xgoal的连线与坐标系的x轴之间的夹角θs-g。以初始点xstart加入随机树,作为根节点。
4、步骤二、在平面直角坐标系中生成一个与障碍物不重合的点作为样本点xsample。
5、步骤三、设定随机树上与样本点xsample距离最小的节点为特征节点nnear;连接样本点xsample与特征节点nnear,得到备选线段;计算备选线段的长度,以及备选线段与x轴之间的夹角θn-s。计算偏差角θ如下:
6、θ=|θs-g-θn-s|
7、步骤四、判断偏差角θ大小,若偏差角θ≥π/2,则舍去当前样本点xsample,并重复执行步骤二和三;否则,进入步骤五。
8、步骤五、计算自适应步长lstep,其表达式如下:
9、lstep=ln-s·cosθ
10、其中,ln-s为备选线段的长度。
11、步骤六、根据自适应步长lstep与夹角θn-s确定新增的节点nnew坐标;将新增的节点nnew加入随机树。
12、步骤七、重复步骤二至六,直到新增的节点nnew与目标点xgoal的连线不经过障碍物时,将目标点xgoal加入随机树;根据随机树确定从初始点xstart移动至目标点xgoal的路径。
13、作为优选,所述的步骤二中,样本点xsample的选择方法如下:
14、根据上一个新增的节点、初始点xstart和目标点xgoal的位置计算目标偏置概率pbias,若随机树上只有根节点,则根节点作为上一个新增的节点。随机生成一个概率值p,若生成的概率值p大于或等于目标偏置概率pbias,则在坐标系中随机选择一个与障碍物不重合的点作为样本点xsample;若生成的概率值p小于目标偏置概率pbias,则将目标点xgoal作为样本点xsample。
15、作为优选,所述的目标偏置概率pbias的计算方法为:
16、
17、ηbias为目标偏置概率系数;lpre-g为上一个新增的节点到目标点xgoal的距离。
18、作为优选,所述的目标偏置概率系数ηbias的取值范围为0~1。
19、作为优选,所述的目标偏置概率系数ηbias的值为0.8。
20、作为优选,所述的步骤六中,确定新增的节点nnew坐标的过程如下:
21、在备选线段ln-s上,以节点nnear为起点,长度为自适应步长lstep,截取目标线段;若目标线段不经过障碍物,以目标线段的终点作为新增的节点nnew。若目标线段经过障碍物,则缩短目标线段的长度,并重新判断目标线段是否经过障碍物,直到目标线段不经过障碍物后,取目标线段的终点作为新增的节点nnew。
22、作为优选,缩短目标线段的长度时,新的长度取原目标线段的50%。
23、第二方面,本发明提供一种计算机设备,其包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述存储器存储计算机程序;所述处理器执行前述的基于自适应步长更新的路径避障方法。
24、第三方面,本发明提供一种可读存储介质,其存储有计算机程序;所述计算机程序被处理器执行时用于实现前述的基于自适应步长更新的路径避障方法。
25、本发明具有的有益效果是:
26、1、本发明根据随机生成的样本点相对于目标方向角度偏差,生成自适应步长,有助于避免移动物体向严重偏移目标方向的方向发生大距离移动,从而使得生成的路径在整体上靠近目标方向,从而减少采样次数,使随机树上的节点集中,冗余节点较少,提高路径生成的效率,以及缩短生成路径的长度。
27、2、本发明中出现新生成节点因障碍物无法抵达时,选择缩短步长的方式进行克服,而非现有技术直接放弃该节点的方式,有助于提高计算效率,并有助于应对更加复杂、多障碍物的场景。
技术特征:
1.一种基于自适应步长更新的路径避障方法,其特征在于:该方法包括以下步骤:
2.根据权利要求1所述的一种基于自适应步长更新的路径避障方法,其特征在于:所述的步骤二中,样本点xsample的选择方法如下:
3.根据权利要求2所述的一种基于自适应步长更新的路径避障方法,其特征在于:所述的目标偏置概率pbias的计算方法为:
4.根据权利要求1所述的一种基于自适应步长更新的路径避障方法,其特征在于:所述的步骤六中,确定新增的节点nnew坐标的过程如下:
5.根据权利要求4所述的一种基于自适应步长更新的路径避障方法,其特征在于:缩短目标线段的长度时,缩短后的目标线段长度取原目标线段的50%。
6.根据权利要求3所述的一种基于自适应步长更新的路径避障方法,其特征在于:所述的目标偏置概率系数ηbias的取值范围为0~1。
7.根据权利要求6所述的一种基于自适应步长更新的路径避障方法,其特征在于:所述的目标偏置概率系数ηbias的值为0.8。
8.根据权利要求1所述的一种基于自适应步长更新的路径避障方法,其特征在于:所述的移动物体具体为机械臂的末端执行器。
9.一种计算机设备,其特征在于,该设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述存储器存储计算机程序;所述处理器执行前述的基于自适应步长更新的路径避障方法。
10.一种可读存储介质,其特征在于,该介质存储有计算机程序;所述计算机程序被处理器执行时用于实现前述的基于自适应步长更新的路径避障方法。
技术总结
本发明公开了一种基于自适应步长更新的路径避障方法,该方法舍弃与目标点处于相反方向随机生成的样本点,并根据样本点相对于目标方向角度偏差,生成自适应步长,有助于避免机械臂向严重偏移目标方向的方向发生大距离移动,从而使得生成的路径在整体上靠近目标方向,从而减少采样次数,使随机树上的节点集中,冗余节点较少,提高路径生成的效率,以及缩短生成路径的长度。本发明中出现新生成节点因障碍物无法抵达时,选择缩短步长的方式进行克服,直至新生成的节点能够抵达,而非现有技术直接放弃该节点的方式,有助于提高计算效率,并有助于应对更加复杂、多障碍物的场景。
技术研发人员:李果磊,王云,周伟,张瑜洛,武新宇,斯伟博
受保护的技术使用者:杭州电子科技大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!