一种机器视觉应用工业机器人框架结构的制作方法
本发明涉及工业机器人框架,具体涉及一种机器视觉应用工业机器人框架结构。
背景技术:
1、机器视觉应用工业机器人是一种先进的机器人系统,其结合了机器视觉技术和工业机器人技术,该系统具备了智能化特点,其为人工智能领域的一个重要分支,归属于图像识别处理,也即其不仅可以执行精确的操作,且可以根据工作环境的变化作出判断和决策,从而广泛应用于各种工业领域,因其所属领域生产品均需具备较高制造精度,故需要其安装框架尺寸较为精确。
2、公开号为cn216099018u的专利说明书中公开了工业机器人视觉定位辅助机构,包括基座,还包括定位组件,所述定位组件固定安装在基座顶部,所述定位组件具体由框架、转轴、支架、旋转齿轮、从动齿轮、伺服电机、弯型支杆、主动齿轮、撑杆和轴承组成,所述基座两侧通过撑杆固定安装在框架内侧,从动齿轮和旋转齿轮转动,并在支架和框架的限制作用下带动基座两端随主动齿轮、从动齿轮和旋转齿轮的转动而做圆周运动。
3、该种技术方案存在的不足之处在于:首先,该机构的支架和框架在限制作用下带动基座两端随主动齿轮、从动齿轮和旋转齿轮的转动做圆周运动,并带动基座底端固定安装的视觉定位器进行定位,该种定位方式与机器人壳体本身形状不契合,导致定位稳定性较差,同时定位的目的是为了对机器人壳体进行再加工,以确保其安装精度合格,该机构的定位结构对机器人壳体整体呈包裹状态,不易进行对机器人壳体的安装精度进行再加工,影响壳体的最终成品质量。
技术实现思路
1、本发明的目的在于提供一种机器视觉应用工业机器人框架结构,所要解决的技术问题如下:现有的机器人框架结构定位机器人壳体的稳定性不足,且存在不易再加工的情况,导致壳体加工后的最终安装精度较差。
2、本发明的目的可以通过以下技术方案实现:
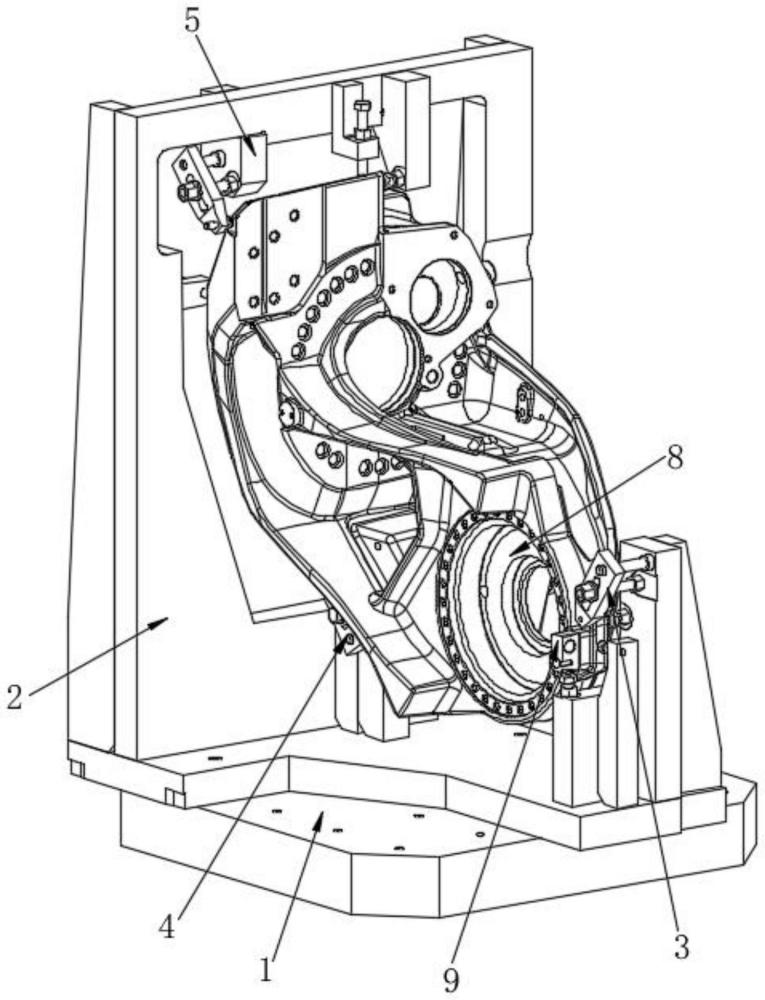
3、一种机器视觉应用工业机器人框架结构,包括定位机构和机器人壳体,所述定位机构用于定位所述机器人壳体,所述定位机构包括有底板和侧板,所述底板一侧设置有侧定位组件,所述底板和侧板之间设置有内定位组件,所述侧板顶端设置有顶定位组件,所述侧定位组件和所述内定位组件用于定位所述机器人壳体顶部,所述内定位组件和所述顶定位组件用于定位所述机器人壳体底部,所述机器人壳体为悬空状,所述机器人壳体底面设置有粗抛面,且一侧设置有精抛面,所述精抛面一侧设置有机械臂连接口。
4、作为本发明进一步的方案:所述机械臂连接口顶端设置有顶接头,所述顶接头外侧定位于所述侧定位组件处,所述侧定位组件包括有底架,所述底架顶端安装有底顶螺栓,所述底架外侧固定连接有外架,所述外架顶部内侧安装有内顶螺栓,所述外架一侧固定连接有外定位架,所述外定位架一侧安装有两个导杆,两个所述导杆之间安装有第一夹块,所述第一夹块内侧与所述顶接头顶部外侧相抵。
5、作为本发明进一步的方案:所述粗抛面一侧设置有侧接筒,所述内定位组件包括有内定位架,所述内定位架外侧安装有两个导杆,两个所述导杆之间安装有第二夹块,所述第二夹块与所述侧接筒外侧壁相抵,所述内定位架与所述侧板之间固定连接有内架,所述内架水平向安装有内底螺栓,且竖直向安装有侧夹螺栓。
6、作为本发明进一步的方案:所述顶定位组件包括有安装于所述侧板顶部一侧的第三夹块,且另一侧安装有顶夹螺栓,所述顶夹螺栓一侧设置有侧定位栓,所述侧板远离所述第三夹块一端的两侧均安装有底接螺栓。
7、作为本发明进一步的方案:各定位螺栓端面均为糙面,所述机器人壳体横置于所述定位机构处。
8、作为本发明进一步的方案:所述精抛面设置于所述机械臂连接口两侧,且呈对角线分布,所述精抛面毛坯面高低落差不高于一毫米。
9、作为本发明进一步的方案:所述机器人壳体底面沿环向均匀设置有若干个定位孔,所述粗抛面设置于各所述定位孔处,所述粗抛面于各所述定位孔处的毛坯高低落差不高于一点五毫米。
10、作为本发明进一步的方案:所述机器人壳体各通孔加工同心度为0.05,平板处的平面度为0.05,相邻平行面之间的平行度为0.05,且相邻垂直面的垂直度为0.1。
11、本发明的有益效果:
12、1、本发明中,在底板和侧板之间的顶端、侧面以及内侧的三处边界位置分别设置了顶定位组件、侧定位组件和内定位组件,并借助各定位组件对机器人壳体进行对应位置的定位,通过三个夹块夹持以及各螺栓从多角度的抵接,实现了对机器人壳体的三维空间内边界处的全方位适配性稳定夹持,且夹持后的机器人壳体主体不受夹持件的结构干扰,同时处于悬空状态,便于后续进行提高壳体精度的再加工,从而使框架整体更稳定且更易抛光。
13、2、本发明中,在稳定夹持机器人壳体的基础上,对机器人壳体顶部的精抛面进行高精度的抛光,对机器人壳体底部的粗抛面进行较低精度的抛光加工,且两处抛光后均可适配机器人壳体使用时的稳定性精度需求,进一步提高框架整体精度,且稳定夹持也提高了加工便利度,避免因振动出现加工误差。
技术特征:
1.一种机器视觉应用工业机器人框架结构,其特征在于,包括定位机构和机器人壳体,所述定位机构用于定位所述机器人壳体,所述定位机构包括有底板(1)和侧板(2),所述底板(1)一侧设置有侧定位组件(3),所述底板(1)和侧板(2)之间设置有内定位组件(4),所述侧板(2)顶端设置有顶定位组件(5),所述侧定位组件(3)和所述内定位组件(4)用于定位所述机器人壳体顶部,所述内定位组件(4)和所述顶定位组件(5)用于定位所述机器人壳体底部,所述机器人壳体为悬空状,所述机器人壳体底面设置有粗抛面(6),且一侧设置有精抛面(7),所述精抛面(7)一侧设置有机械臂连接口(8)。
2.根据权利要求1所述的一种机器视觉应用工业机器人框架结构,其特征在于,所述机械臂连接口(8)顶端设置有顶接头(9),所述顶接头(9)外侧定位于所述侧定位组件(3)处,所述侧定位组件(3)包括有底架(31),所述底架(31)顶端安装有底顶螺栓(32),所述底架(31)外侧固定连接有外架(33),所述外架(33)顶部内侧安装有内顶螺栓(34),所述外架(33)一侧固定连接有外定位架(35),所述外定位架(35)一侧安装有两个导杆,两个所述导杆之间安装有第一夹块(36),所述第一夹块(36)内侧与所述顶接头(9)顶部外侧相抵。
3.根据权利要求1所述的一种机器视觉应用工业机器人框架结构,其特征在于,所述粗抛面(6)一侧设置有侧接筒(10),所述内定位组件(4)包括有内定位架(41),所述内定位架(41)外侧安装有两个导杆,两个所述导杆之间安装有第二夹块(42),所述第二夹块(42)与所述侧接筒(10)外侧壁相抵,所述内定位架(41)与所述侧板(2)之间固定连接有内架(43),所述内架(43)水平向安装有内底螺栓(44),且竖直向安装有侧夹螺栓(45)。
4.根据权利要求1所述的一种机器视觉应用工业机器人框架结构,其特征在于,所述顶定位组件(5)包括有安装于所述侧板(2)顶部一侧的第三夹块(51),且另一侧安装有顶夹螺栓(52),所述顶夹螺栓(52)一侧设置有侧定位栓(53),所述侧板(2)远离所述第三夹块(51)一端的两侧均安装有底接螺栓(54)。
5.根据权利要求1所述的一种机器视觉应用工业机器人框架结构,其特征在于,各定位螺栓端面均为糙面,所述机器人壳体横置于所述定位机构处。
6.根据权利要求1所述的一种机器视觉应用工业机器人框架结构,其特征在于,所述精抛面(7)设置于所述机械臂连接口(8)两侧,且呈对角线分布,所述精抛面(7)毛坯面高低落差不高于一毫米。
7.根据权利要求1所述的一种机器视觉应用工业机器人框架结构,其特征在于,所述机器人壳体底面沿环向均匀设置有若干个定位孔,所述粗抛面(6)设置于各所述定位孔处,所述粗抛面(6)于各所述定位孔处的毛坯高低落差不高于一点五毫米。
8.根据权利要求1所述的一种机器视觉应用工业机器人框架结构,其特征在于,所述机器人壳体各通孔加工同心度为0.05,平板处的平面度为0.05,相邻平行面之间的平行度为0.05,且相邻垂直面的垂直度为0.1。
技术总结
本发明公开了一种机器视觉应用工业机器人框架结构,涉及工业机器人框架技术领域。本发明包括定位机构和机器人壳体,定位机构用于定位机器人壳体,定位机构包括有底板和侧板,底板一侧设置有侧定位组件,底板和侧板之间设置有内定位组件,侧板顶端设置有顶定位组件,侧定位组件和内定位组件用于定位机器人壳体顶部,内定位组件和顶定位组件用于定位机器人壳体底部,机器人壳体为悬空状,机器人壳体底面设置有粗抛面,且一侧设置有精抛面,精抛面一侧设置有机械臂连接口。本发明通过对机器人壳体的各边界进行全方位的稳定夹持,并对安装面进行适宜的抛光,使框架更为稳定且易于加工,提高框架整体加工精度。
技术研发人员:陈江波,肖强,徐新荣
受保护的技术使用者:安徽涌诚机械有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!