一种煤矿用机器人超速、失稳保护控制系统及方法与流程
本发明涉及机器人控制,尤其涉及一种煤矿用机器人超速、失稳保护控制系统及方法。
背景技术:
1、随着煤矿智能化技术的推进,多种形式的机器人在煤矿井下应用而生,机器人在煤炭行业的应用也日趋普遍化。煤矿机器人可以适用各种复杂的生产环境,实现煤矿生产的智能化,带动煤矿行业产业升级,在传统的煤矿生产中,由于作业环境恶劣,存在各种不安全因素,使得煤矿生产效率低下,煤矿机器人的应用可以提高生产效率,促进煤炭行业的可持续发展。
2、对于多功能无人驾驶机器人,主要的研究方向是在煤矿井下巷道平稳的无人驾驶及监测周围环境。由于地理环境的影响或根据煤层的延展方向,造成井下巷道不能完全水平的,所以在有俯仰角度较大或着上下起伏的巷道环境下,对机器人无人驾驶的控制具有一定的考验,尤其是在大角度巷道下无人驾驶,如何保持机器人平稳运行不产生超速和重心失稳情况,需要进一步研究。
技术实现思路
1、针对上述现有技术的不足,本发明提供一种煤矿用机器人超速、失稳保护控制系统及方法;
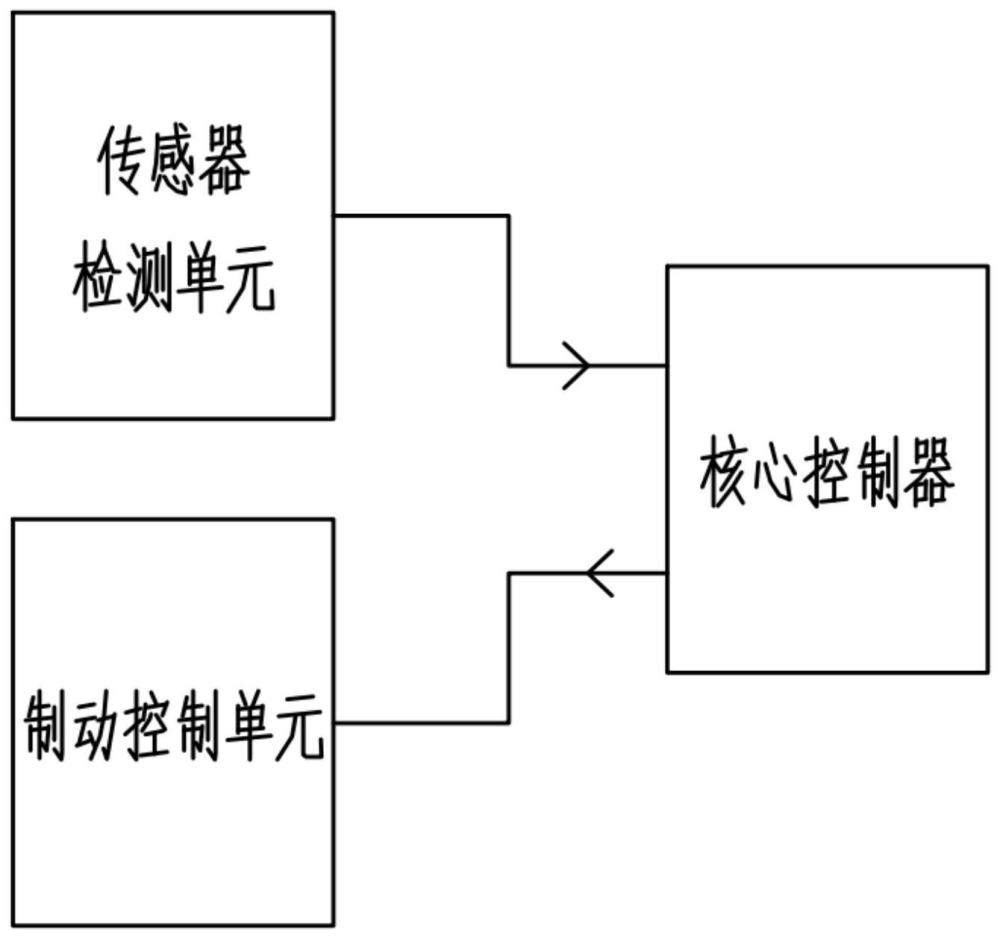
2、一方面,一种煤矿用机器人超速、失稳保护控制系统,包括传感器检测单元、制动控制单元和核心控制器;其中传感器检测单元的输出端连接所述核心控制器的输入端,核心控制器的的输出端连接所述制动控制单元的输入端;
3、所述传感器检测单元包括姿态检测传感器和转速传感器,姿态检测传感器用于实时检测机器人的俯仰角度,转速传感器用于实时检测机器人驱动电机的转动速度;
4、所述制动控制单元包括驱动电机、电磁制动器以及驱动控制器,所述电磁制动器与驱动电机输出轴连接,电磁制动器以及驱动控制器由核心控制器进行控制;驱动控制器控制驱动电机的启停和转速;
5、所述姿态检测传感器设置于机器人腔体内壁且与机器人整机平行布置。
6、所述转速传感器设置于机器人驱动电机的输出轴上。
7、另一方面,一种煤矿用机器人超速、失稳保护控制方法,基于前述一种煤矿用机器人超速、失稳保护控制系统实现,包括以下步骤:
8、步骤1、机器人以设定速度运行,姿态传感器每100ms读取一次机器人俯仰角α,转速传感器每100ms读取一次驱动电机的转速v,俯仰角α和转速v实时上传至核心控制器;
9、所述姿态传感器输出的数据通过姿态解算互补滤波法进行优化,每隔设定时间使用姿态传感器中的加速度计对姿态传感器中陀螺仪进行校准;其中互补滤波法采用陀螺仪得到的角度做为最优值,定时对加速度采样来的加速度值进行取平均值来校正陀螺仪的得到的角度;
10、步骤2、核心控制器对接收到的俯仰角α进行判断,俯仰角α绝对值大于10°时,核心控制器向驱动控制器发送停机指令,驱动控制器将驱动电机停机;
11、步骤3、核心控制器对接收到的转速v进行判断,转速v大于设定速度1.5倍时,核心控制器向驱动控制器发送停机指令,驱动控制器将驱动电机停机;
12、步骤4、从发送停止命令信号核心控制器开始计时20s,如果20s内v持续大于设定速度2倍,核心控制器向电磁制动器发送指令投入使用。
13、采用上述技术方案所产生的有益效果在于:采用姿态检测传感器实时检测机器人的俯仰角度,转速传感器实时检测机器人驱动电机的转动速度,当机器人失稳或超速时驱动控制器控制驱动电机制动;当机器人超速严重时电磁制动器投入使用将驱动电机制动,双重制动方案确保机器人在超速、失稳状态下能够停车。
技术特征:
1.一种煤矿用机器人超速、失稳保护控制系统,其特征在于,包括传感器检测单元、制动控制单元和核心控制器;其中传感器检测单元的输出端连接所述核心控制器的输入端,核心控制器的的输出端连接所述制动控制单元的输入端;
2.根据权利要求1所述的一种煤矿用机器人超速、失稳保护控制系统,其特征在于:所述姿态检测传感器设置于机器人腔体内壁且与机器人整机平行布置。
3.根据权利要求1所述的一种煤矿用机器人超速、失稳保护控制系统,其特征在于:所述转速传感器设置于机器人驱动电机的输出轴上。
4.一种煤矿用机器人超速、失稳保护控制方法,根据权利要求1-3任一项所述的一种煤矿用机器人超速、失稳保护控制系统,其特征在于,包括以下步骤:
5.根据权利要求4所述的一种煤矿用机器人超速、失稳保护控制方法,其特征在于:所述姿态传感器输出的数据通过姿态解算互补滤波法进行优化,每隔设定时间使用姿态传感器中的加速度计对姿态传感器中陀螺仪进行校准;其中互补滤波法采用陀螺仪得到的角度做为最优值,定时对加速度采样来的加速度值进行取平均值来校正陀螺仪的得到的角度。
技术总结
本发明涉及机器人控制技术领域,尤其涉及一种煤矿用机器人超速、失稳保护控制系统及方法。系统包括传感器检测单元、制动控制单元和核心控制器,传感器检测单元包括姿态检测传感器和转速传感器,姿态检测传感器用于实时检测机器人的俯仰角度,转速传感器用于实时检测机器人驱动电机的转动速度;制动控制单元包括驱动控制器和电磁制动器,驱动控制器用于控制机器人驱动电机的启停和转速;电磁制动器与驱动电机输出轴连接,电磁制动器由核心控制器进行控制,当机器人失稳或超速时驱动控制器控制驱动电机制动;当机器人超速严重时电磁制动器投入使用将驱动电机制动,双重制动方案确保机器人在超速、失稳状态下能够停车。
技术研发人员:马龙,郭长娜,吴钰晶,王哲,杨华松,陈永冉,张岩,康馨丹,齐宁,赵佰顺
受保护的技术使用者:中煤科工集团沈阳研究院有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!