一种多用途危险物处置机器人
本发明属于机器人,更具体的说是涉及一种多用途危险物处置机器人。
背景技术:
1、能对危险物处置的机器人可以通过远程控制机器人对目标危险物进行侦测,抓取,运输,从而代替人力将危险物或存在于危险环境中的物品转移到安全地带。但现有的能对危险物处置的机器人大多数结构单一,只能对有限范围内姿态单一的目标物进行抓取,缺少对不同高度和不同姿态的目标物进行抓取的功能,所以用途单一。
2、因此,如何提供一种多用途危险物处置机器人是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种多用途危险物处置机器人,具有整个机器人可以快速的行进和灵活的旋转,能够进行高度调整,能够对不同大小、不同形状的物品进行吸附抓取,能够对四周多方位进行观察。能对周围环境的状况进行实时监测,同时反馈给操作者相应的环境数据的优点。
2、为了实现上述目的,本发明采用如下技术方案:
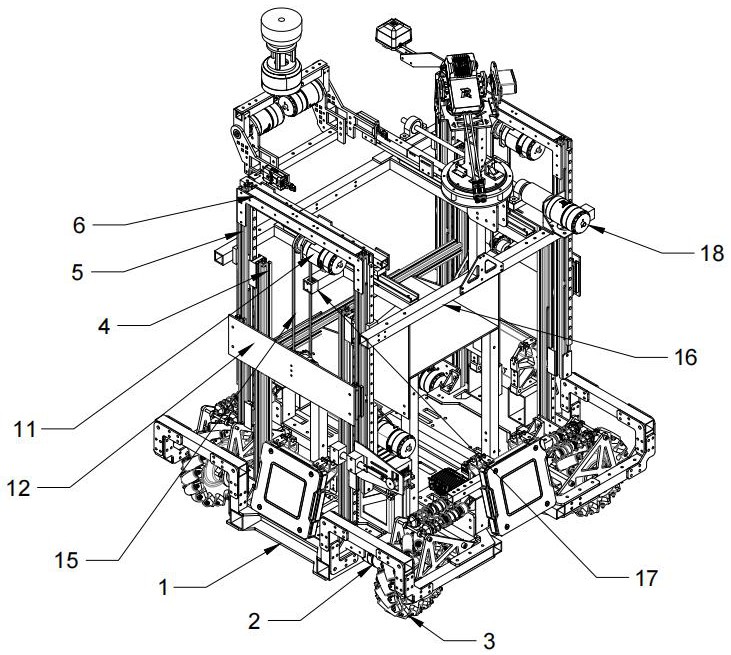
3、一种多用途危险物处置机器人,包括:底板、第一防爆电机、麦克纳姆轮、单片机、第一升降机构、第二升降机构、伸缩机构、观察机构、旋转吸附机构和环境监测机构;所述第一防爆电机安装在底板上,所述麦克纳姆轮与第一防爆电机的输出端连接,所述单片机安装在底板上,所述第一升降机构安装在底板上,所述第二升降机构安装在第一升降机构上,所述伸缩机构安装在第二升降机构上,用于调整旋转吸附机构的位置,所述观察机构安装在第二升降机构上,用于观察周围环境状况,所述旋转吸附机构安装在第二升降机构上,用于吸附危险物,所述环境监测机构安装在第一升降机构上,用于对周围环境的状况进行实时监测,所述第一防爆电机、第一升降机构、第二升降机构、伸缩机构、观察机构、旋转吸附机构和环境监测机构均与单片机电连接。
4、进一步地,所述第一升降机构包括:立柱、升降杆、横杆、齿板、固定块、第二防爆电机和第一齿轮;所述立柱的一端安装在底板上,所述升降杆滑动连接在立柱的一侧,所述横杆与升降杆连接,所述齿板固定在升降杆的一侧,所述固定块安装在立柱上,所述第二防爆电机安装在固定块上,所述第二防爆电机的输出端与第一齿轮连接,所述第一齿轮与齿板啮合,所述第二防爆电机与单片机电连接。
5、进一步地,所述环境监测机构包括:传感器连接杆和气体浓度传感器;所述传感器连接杆一端与横杆连接,另一端与气体浓度传感器连接,所述气体浓度传感器与单片机电连接。
6、进一步地,所述第二升降机构包括:第三防爆电机、固定板、链轮固定块、从动链轮、链条、升降框架和连接块;所述第三防爆电机安装在横杆的一侧,所述固定板与升降杆滑动连接,所述链轮固定块安装在固定板的一侧,所述链轮固定块上转动连接有从动链轮,所述第三防爆电机的输出端连接有主动链轮,所述主动链轮和从动链轮均与链条啮合,所述升降框架位于底板的正上方,且与升降杆的一侧滑动连接,所述升降框架上安装有连接块,所述连接块与链条连接,所述第三防爆电机与单片机电连接。
7、进一步地,所述伸缩机构包括:第四防爆电机、丝杆、丝杆固定块、滑轨和滑动框;所述第四防爆电机安装在升降框架上,所述第四防爆电机的输出端与丝杆连接,所述丝杆的另一端转动连接在升降框架上,所述丝杆固定块套设在丝杆上,且与丝杆螺纹连接,所述丝杆固定块的一侧与滑动框连接,所述升降框架上安装有滑轨,所述滑轨与滑动框滑动连接,所述滑动框用于承载旋转吸附机构,所述第四防爆电机与单片机电连接。
8、进一步地,所述旋转吸附机构包括:防爆电机固定板、第五防爆电机、旋转机构固定板、联轴器、中空电机承载板、中空电机和海绵吸盘;所述防爆电机固定板安装在滑动框上,所述第五防爆电机安装在防爆电机固定板上,所述旋转机构固定板安装在滑动框上,所述第五防爆电机的输出端穿过联轴器与旋转机构固定板转动连接,所述第五防爆电机的输出端与联轴器固定连接,所述中空电机承载板安装在联轴器的一侧,所述中空电机安装在中空电机承载板上,所述中空电机的输出端与海绵吸盘连接,所述海绵吸盘的一侧与气泵连接,所述第五防爆电机和中空电机与单片机电连接。
9、进一步地,所述观察机构包括:水平旋转平台固定杆、水平旋转平台、竖直旋转平台、竖直旋转平台固定杆、旋转支架、第六防爆电机和摄像头;所述水平旋转平台固定杆一端与滑动框连接,另一端与水平旋转平台连接,所述水平旋转平台通过电机驱动进行旋转,所述竖直旋转平台固定杆一端与水平旋转平台连接,另一端与竖直旋转平台连接,所述旋转支架安装在竖直旋转平台上,所述第六防爆电机的输出端与旋转支架连接,所述摄像头安装在第六防爆电机上,所述第六防爆电机和摄像头与单片机电连接。
10、进一步地,所述麦克纳姆轮一侧的底板上转动连接有车轮架,所述车轮架的一侧与麦克纳姆轮转动连接,所述车轮架一侧的底板上安装有避震器安装座,所述避震器安装座上转动连接有避震器,所述避震器的另一端与车轮架转动连接。
11、进一步地,所述底板的四周安装有底盘保护框架。
12、本发明的有益效果在于:
13、本发明结构简单,使用方便,使用时利用摄像头观察危险物位置,通过气体浓度传感器监测周围环境的氧气、甲烷、一氧化碳、氨气在空气中含量并实时通过单片机控制反馈给操作者,通过单片机控制第一防爆电机工作,驱动麦克纳姆轮转动,待机器人运动至危险物近前,关闭第一防爆电机,启动第二防爆电机,第二防爆电机驱动第一齿轮转动,从而带动齿板上下移动,对旋转吸附机构进行快速粗略调整,而后关闭第二防爆电机,启动第三防爆电机,通过主动链轮与从动链轮配合拉动链条,链条带动连接块上下移动,从而使得升降框架移动至合适的位置完成精确调整,而后关闭第三防爆电机,开启第四防爆电机,第四防爆电机带动丝杆转动,与丝杆螺纹连接的丝杆固定块在丝杆上移动,带动旋转吸附机构向外移动,待移动至合适位置时,关闭第四防爆电机,紧接着开启第五防爆电机,调整海绵吸盘的角度,使其贴合危险物表面,此时启动气泵,通过气泵抽气使海绵吸盘产生负压,吸附危险物,而后启动第二防爆电机,第二防爆电机驱动第一齿轮转动,从而带动齿板上下移动,将危险物升起,再启动第一防爆电机工作,驱动麦克纳姆轮转动,将危险物带离现场。从而使得本发明具有整个机器人可以快速的行进和灵活的旋转,能够进行高度调整,能够对不同大小、不同形状的物品进行吸附抓取,能够对四周多方位进行观察。能对周围环境的状况进行实时监测,同时反馈给操作者相应的环境数据的优点。
技术特征:
1.一种多用途危险物处置机器人,其特征在于,包括:底板(1)、第一防爆电机(2)、麦克纳姆轮(3)、单片机、第一升降机构、第二升降机构、伸缩机构、观察机构、旋转吸附机构和环境监测机构;所述第一防爆电机(2)安装在底板(1)上,所述麦克纳姆轮(3)与第一防爆电机(2)的输出端连接,所述单片机安装在底板(1)上,所述第一升降机构安装在底板(1)上,所述第二升降机构安装在第一升降机构上,所述伸缩机构安装在第二升降机构上,用于调整旋转吸附机构的位置,所述观察机构安装在第二升降机构上,用于观察周围环境状况,所述旋转吸附机构安装在第二升降机构上,用于吸附危险物,所述环境监测机构安装在第一升降机构上,用于对周围环境的状况进行实时监测,所述第一防爆电机(2)、第一升降机构、第二升降机构、伸缩机构、观察机构、旋转吸附机构和环境监测机构均与单片机电连接。
2.根据权利要求1所述的一种多用途危险物处置机器人,其特征在于,所述第一升降机构包括:立柱(4)、升降杆(5)、横杆(6)、齿板(7)、固定块(8)、第二防爆电机(9)和第一齿轮(10);所述立柱(4)的一端安装在底板(1)上,所述升降杆(5)滑动连接在立柱(4)的一侧,所述横杆(6)与升降杆(5)连接,所述齿板(7)固定在升降杆(5)的一侧,所述固定块(8)安装在立柱(4)上,所述第二防爆电机(9)安装在固定块(8)上,所述第二防爆电机(9)的输出端与第一齿轮(10)连接,所述第一齿轮(10)与齿板(7)啮合,所述第二防爆电机(9)与单片机电连接。
3.根据权利要求2所述的一种多用途危险物处置机器人,其特征在于,所述环境监测机构包括:传感器连接杆(40)和气体浓度传感器(41);所述传感器连接杆(40)一端与横杆(6)连接,另一端与气体浓度传感器(41)连接,所述气体浓度传感器(41)与单片机电连接。
4.根据权利要求2所述的一种多用途危险物处置机器人,其特征在于,所述第二升降机构包括:第三防爆电机(11)、固定板(12)、链轮固定块(13)、从动链轮(14)、链条(15)、升降框架(16)和连接块(17);所述第三防爆电机(11)安装在横杆(6)的一侧,所述固定板(12)与升降杆(5)滑动连接,所述链轮固定块(13)安装在固定板(12)的一侧,所述链轮固定块(13)上转动连接有从动链轮(14),所述第三防爆电机(11)的输出端连接有主动链轮,所述主动链轮和从动链轮(14)均与链条(15)啮合,所述升降框架(16)位于底板(1)的正上方,且与升降杆(5)的一侧滑动连接,所述升降框架(16)上安装有连接块(17),所述连接块(17)与链条(15)连接,所述第三防爆电机(11)与单片机电连接。
5.根据权利要求4所述的一种多用途危险物处置机器人,其特征在于,所述伸缩机构包括:第四防爆电机(18)、丝杆(19)、丝杆固定块(20)、滑轨(21)和滑动框(22);所述第四防爆电机(18)安装在升降框架(16)上,所述第四防爆电机(18)的输出端与丝杆(19)连接,所述丝杆(19)的另一端转动连接在升降框架(16)上,所述丝杆固定块(20)套设在丝杆(19)上,且与丝杆(19)螺纹连接,所述丝杆固定块(20)的一侧与滑动框(22)连接,所述升降框架(16)上安装有滑轨(21),所述滑轨(21)与滑动框(22)滑动连接,所述滑动框(22)用于承载旋转吸附机构,所述第四防爆电机(18)与单片机电连接。
6.根据权利要求5所述的一种多用途危险物处置机器人,其特征在于,所述旋转吸附机构包括:防爆电机固定板(23)、第五防爆电机(24)、旋转机构固定板(25)、联轴器(26)、中空电机承载板(27)、中空电机(28)和海绵吸盘(29);所述防爆电机固定板(23)安装在滑动框(22)上,所述第五防爆电机(24)安装在防爆电机固定板(23)上,所述旋转机构固定板(25)安装在滑动框(22)上,所述第五防爆电机(24)的输出端穿过联轴器(26)与旋转机构固定板(25)转动连接,所述第五防爆电机(24)的输出端与联轴器(26)固定连接,所述中空电机承载板(27)安装在联轴器(26)的一侧,所述中空电机(28)安装在中空电机承载板(27)上,所述中空电机(28)的输出端与海绵吸盘(29)连接,所述海绵吸盘(29)的一侧与气泵连接,所述第五防爆电机(24)和中空电机(28)与单片机电连接。
7.根据权利要求5所述的一种多用途危险物处置机器人,其特征在于,所述观察机构包括:水平旋转平台固定杆(30)、水平旋转平台(31)、竖直旋转平台(32)、竖直旋转平台固定杆(33)、旋转支架(34)、第六防爆电机(35)和摄像头(36);所述水平旋转平台固定杆(30)一端与滑动框(22)连接,另一端与水平旋转平台(31)连接,所述水平旋转平台(31)通过电机驱动进行旋转,所述竖直旋转平台固定杆(33)一端与水平旋转平台(31)连接,另一端与竖直旋转平台(32)连接,所述旋转支架(34)安装在竖直旋转平台(32)上,所述第六防爆电机(35)的输出端与旋转支架(34)连接,所述摄像头(36)安装在第六防爆电机(35)上,所述第六防爆电机(35)和摄像头(36)与单片机电连接。
8.根据权利要求1所述的一种多用途危险物处置机器人,其特征在于,所述麦克纳姆轮(3)一侧的底板(1)上转动连接有车轮架(37),所述车轮架(37)的一侧与麦克纳姆轮(3)转动连接,所述车轮架(37)一侧的底板(1)上安装有避震器安装座(38),所述避震器安装座(38)上转动连接有避震器(39),所述避震器(39)的另一端与车轮架(37)转动连接。
9.根据权利要求1所述的一种多用途危险物处置机器人,其特征在于,所述底板(1)的四周安装有底盘保护框架(42)。
技术总结
本发明公开了一种多用途危险物处置机器人,属于机器人技术领域,包括:第一防爆电机安装在底板上,麦克纳姆轮与第一防爆电机的输出端连接,单片机安装在底板上,第一升降机构安装在底板上,第二升降机构安装在第一升降机构上,伸缩机构安装在第二升降机构上,观察机构安装在第二升降机构上,旋转吸附机构安装在第二升降机构上,环境监测机构安装在第一升降机构上,本发明具有整个机器人可以快速的行进和灵活的旋转,能够进行高度调整,能够对不同大小、不同形状的物品进行吸附抓取,能够对四周多方位进行观察。能对周围环境的状况进行实时监测,同时反馈给操作者相应的环境数据的优点。
技术研发人员:马佳琨,王丽,肖博,侯家昊,季怀明,戴锐,李海鹏,龚学超,陈正洋
受保护的技术使用者:齐鲁工业大学(山东省科学院)
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!