基于2URR-UPS并联模块的搬运混联机器人的制作方法
本发明涉及一种基于2urr-ups并联模块的搬运混联机器人,属于码垛机器人领域。
背景技术:
1、目前常见的码垛机器人为多关节臂结构,其运动依靠减速机实现执行末端各个方向的转动的升降。
2、但是其末端的执行速度慢,齿轮组结构的减速电机关节导致转动一次或上下摆动一下花费数秒时间。对于快节奏的生产线来说,特别是物料的码垛,多关节臂的应用有速度不够快的局限。
3、并联机器人是一种多执行运动链的机器人,通过三组或多组运动臂的伸缩转动,带动末端的执行器运动。但是这种结构适合于竖向及短距离的搬运,码垛应用的话需要的机构巨大。
技术实现思路
1、针对上述问题,本发明提供一种基于2urr-ups并联模块的搬运混联机器人,结合并联机器人的快速实现快速优点及多关节臂的远距离移动路径。
2、为实现上述目的,本发明采用的技术方案是:
3、本发明基于2urr-ups并联模块的搬运混联机器人,包括,
4、两多关节臂、一组直线伸缩臂、转头和定平台机架;
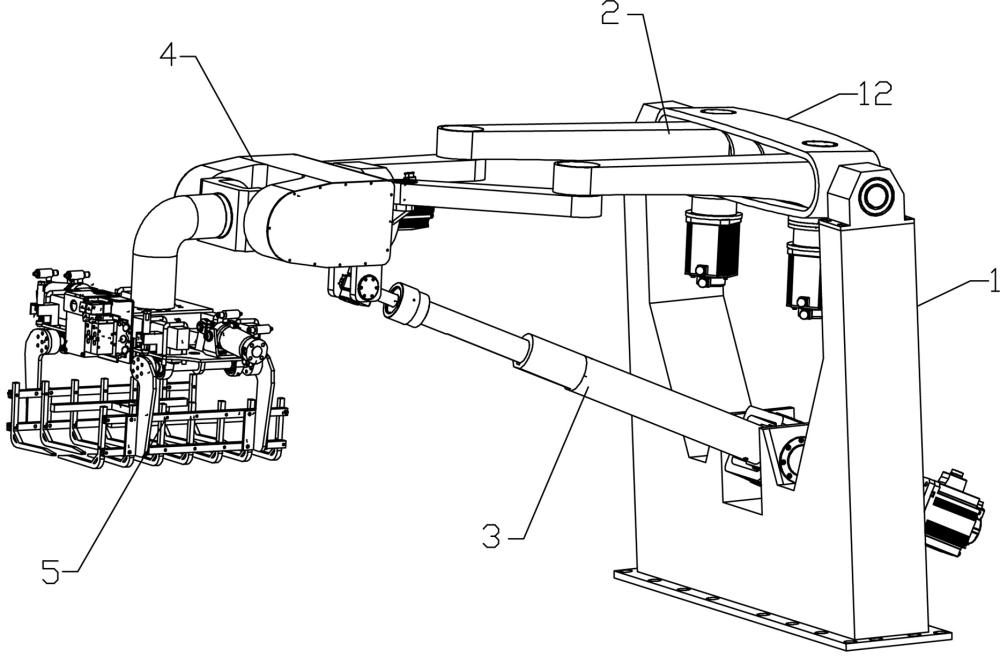
5、所述多关节臂通过转动铰链设置在转动架上,转动架两端通过横向的转动机构设置在定平台机架上,直线伸缩臂通过虎克铰连设置在多关节臂下部的定平台机架上,
6、多关节臂为至少两转动臂杆铰接组成,且处于水平面上运动,所述多关节臂前端通过竖向转动付连接于动平台,直线伸缩转动臂的伸缩杆前端通过复合球铰连接于动平台,且处于两组多关节臂的中心下部位置;
7、动平台上设置二级转头,二级转头的前端设置末端执行机构。
8、根据所述的基于2urr-ups并联模块的搬运混联机器人,所述定平台机构为设置u型状的动力槽空间,所述直线伸缩臂下端的虎克铰设置在动力槽空间的底部位置,所述定平台机构顶部两侧设置转动副连接转动架的两端,转动架以转动副为转动中心带动多关节臂上下摆动。
9、根据所述的基于2urr-ups并联模块的搬运混联机器人,所述转动架为箱体,前端面镂空嵌入安装所述多关节臂,安装位置的转动架上上下侧面开孔设置转轴,转动架的下部设置连接转动的减速伺服电机,减速伺服电机驱动多关节臂以转轴为中心左右摆动。
10、根据所述的基于2urr-ups并联模块的搬运混联机器人,所述多关节臂为双臂结构,双臂之间铰接相连,且铰轴在多关节臂水平时呈竖向状态。
11、根据所述的基于2urr-ups并联模块的搬运混联机器人,所述动平台分为转动台和连接台,转动台于连接台之间设置一级动端转动驱动,一级动端转动驱动带动转动台与连接台之间相对转动,所述多关节臂和直线伸缩臂的运动端连接于连接台。
12、根据所述的基于2urr-ups并联模块的搬运混联机器人,所述动平台的前端设有u型口,所述二级转头通过二级转动机构设置在u型口中,二级转头的下部连接所述的末端执行机构。
13、根据所述的基于2urr-ups并联模块的搬运混联机器人,末端执行机构为码垛机械手,所述二级转头呈直角状,一端连接所述的末端执行机构,另一端放入动平台的u型口中与二级转动机构的运动端相连。
14、根据所述的基于2urr-ups并联模块的搬运混联机器人,定平台机架的底部设有安装板,安装板突出定平台机架一周,突出部分设有安装孔,所述定平台机架为金属板焊接而成的箱体结构。
15、根据所述的基于2urr-ups并联模块的搬运混联机器人,直线伸缩臂为电动伸缩杆,缸体部分底部连接所述的虎克铰,顶部伸缩杆端部连接动平台。
16、本发明的优点在于:
17、该机器人可用于小袋包装、箱装以及桶装物品的码垛工作。通过改造后也可作为装车工作。
18、本装置的多铰链结构具有运动速度快的优点,也有过关节机械臂的移动距离远的优点,能够提高包装物料的搬运效果。
技术特征:
1.一种基于2urr-ups并联模块的搬运混联机器人,其特征是,
2.根据权利要求 1所述的基于2urr-ups并联模块的搬运混联机器人,其特征是,所述定平台机构为设置u型状的动力槽空间(11),所述直线伸缩臂(3)下端的虎克铰设置在动力槽空间(11)的底部位置,所述定平台机构顶部两侧设置水平转动副(13)连接转动架(12)的两端,转动架(12)以水平转动副(13)为转动中心带动多关节臂(2)上下摆动。
3.根据权利要求 1所述的基于2urr-ups并联模块的搬运混联机器人,其特征是,所述转动架(12)为箱体,前端面镂空嵌入安装所述多关节臂(2),安装位置的转动架(12)上上下侧面开孔设置转轴,转动架(12)的下部设置连接转动的减速伺服电机(23),减速伺服电机(23)驱动多关节臂(2)以转轴为中心左右摆动。
4.根据权利要求 1所述的基于2urr-ups并联模块的搬运混联机器人,其特征是,所述多关节臂(2)为双关节臂臂结构,双臂之间铰接运动副(21)相连,且铰接运动副(21)的铰轴在多关节臂(2)水平时呈竖向状态。
5.根据权利要求 1所述的基于2urr-ups并联模块的搬运混联机器人,其特征是,所述动平台(4)分为转动台(41)和连接台(42),转动台(41)于连接台(42)之间设置一级动端转动驱动(43),一级动端转动驱动(43)带动转动台(41)与连接台(42)之间相对转动,所述多关节臂(2)和直线伸缩臂(3)的运动端连接于连接台(42)。
6.根据权利要求 1所述的基于2urr-ups并联模块的搬运混联机器人,其特征是,所述动平台(4)的前端设有u型口,所述二级转头(44)通过二级转动机构设置在u型口中,二级转头(44)的下部连接所述的末端执行机构(5),二级转动机构内置在转动台(41)中。
7.根据权利要求 6所述的基于2urr-ups并联模块的搬运混联机器人,其特征是,末端执行机构(5)为码垛机械手,所述二级转头(44)呈直角状,一端连接所述的末端执行机构(5),另一端放入动平台(4)的u型口中与二级转动机构的运动端相连。
8.根据权利要求1所述的基于2urr-ups并联模块的搬运混联机器人,其特征是,定平台机架(1)的底部设有安装板(14),安装板(14)突出定平台机架(1)一周,突出部分设有安装孔(15),所述定平台机架(1)为金属板焊接而成的箱体结构。
9.根据权利要求1所述的基于2urr-ups并联模块的搬运混联机器人,其特征是,直线伸缩臂(3)为电动伸缩杆(32),缸体(31)部分底部连接所述的虎克铰,顶部伸缩杆(32)端部连接动平台(4)。
技术总结
本发明涉及一种基于2URR‑UPS并联模块的搬运混联机器人,属于码垛机器人领域。本发明采用的技术方案是:本发明基于2URR‑UPS并联模块的搬运混联机器人,包括两多关节臂、一组直线伸缩臂、转头和定平台机架;多关节臂通过转动铰链设置在转动架上,转动架两端通过横向的转动机构设置在定平台机架上,直线伸缩臂通过虎克铰连设置在多关节臂下部的定平台机架上,直线伸缩转动臂的伸缩杆前端通过复合球铰连接于动平台,且处于两组多关节臂的中心下部位置;动平台上设置二级转头,二级转头的前端设置末端执行机构。本装置的多铰链结构具有运动速度快的优点,也有过关节机械臂的移动距离远的优点,能够提高包装物料的搬运效果。
技术研发人员:山显雷,相增和,金祖进,杨坤
受保护的技术使用者:三维汉界机器(山东)股份有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!