一种机器人防跌落控制方法、装置、设备及系统与流程
本发明涉及防跌落控制领域,更具体的说,涉及一种机器人防跌落控制方法、装置、设备及系统。
背景技术:
1、在光伏发电领域,一般会配置光伏组件来发电,以提供清洁的电能。
2、在光伏组件使用过程中,尘土等会掉落到光伏组件上,降低光伏组件的发电能力。为了解决这一问题,可通过配置光伏清扫机器人对光伏组件进行清扫,以避免尘土等遮挡导致的降低光伏组件的发电能力的情况。
3、光伏清扫机器人在清扫过程中,当行驶到光伏组件的边缘时,会存在跌落风险,降低光伏组件清扫的安全性和可靠性。那么,如何实现机器人的防跌落,是本领域技术人员亟需解决的技术问题。
技术实现思路
1、有鉴于此,本发明提供一种机器人防跌落控制方法、装置、设备及系统,以解决亟需实现机器人的防跌落功能的问题。
2、为解决上述技术问题,本发明采用了如下技术方案:
3、一种机器人防跌落控制方法,包括:
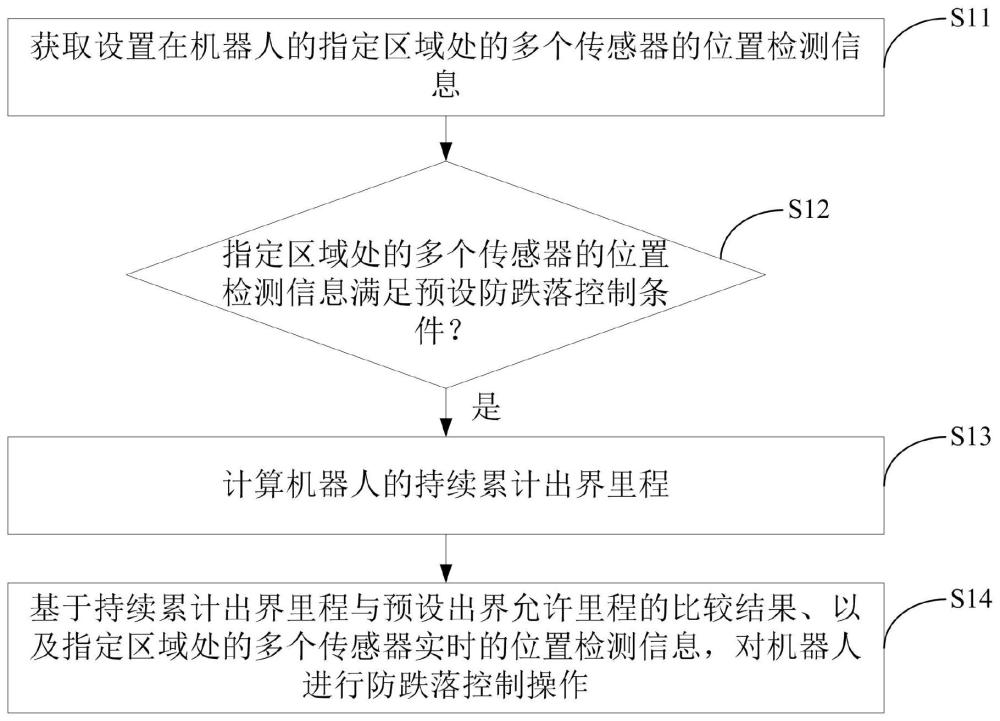
4、获取设置在机器人的指定区域处的多个传感器的位置检测信息;所述指定区域中,同一区域处的多个传感器的设置位置满足预设位置设置条件;
5、判断所述指定区域处的多个传感器的位置检测信息是否满足预设防跌落控制条件;
6、若是,计算所述机器人的持续累计出界里程;
7、基于所述持续累计出界里程与预设出界允许里程的比较结果、以及所述指定区域处的多个传感器实时的位置检测信息,对所述机器人进行防跌落控制操作。
8、可选地,同一区域处的多个传感器中,目标传感器设置在所述区域中的指定位置处,非目标传感器与所述目标传感器的横向距离小于预设距离,所述非目标传感器的纵向设置位置位于由所述目标传感器的设置位置横向延长线与指定位置横向延长线组成的纵向距离范围内。
9、可选地,获取设置在机器人的指定区域处的多个传感器的位置检测信息,包括:
10、获取所述指定区域中,每一区域设置的每一个传感器检测的平面距离信息;
11、将所述平面距离信息作为位置检测信息。
12、可选地,判断所述指定区域处的多个传感器的位置检测信息是否满足预设防跌落控制条件,包括:
13、判断所述指定区域中,至少一区域中的每一个传感器的位置检测信息是否均大于预设距离阈值;
14、若是,则判断出所述指定区域处的多个传感器的位置检测信息满足预设防跌落控制条件。
15、可选地,计算所述机器人的持续累计出界里程,包括:
16、计算所述机器人的履带行走距离;
17、将所述履带行走距离确定为所述机器人的持续累计出界里程。
18、可选地,基于所述持续累计出界里程与预设出界允许里程的比较结果、以及所述指定区域处的多个传感器实时的位置检测信息,对所述机器人进行防跌落控制操作,包括:
19、获取预设出界允许里程;
20、判断所述持续累计出界里程是否大于所述预设出界允许里程;
21、若是,调整所述机器人的轮速,以调整所述机器人的运行方向;
22、若否,判断所述指定区域处的任一个传感器实时的位置检测信息是否满足正常运行控制条件;
23、若满足,清空所述持续累计出界里程。
24、可选地,调整所述机器人的轮速,包括:
25、基于所述指定区域处的多个传感器实时的位置检测信息,确定需进行防跌落控制的目标运动轮;
26、将控制所述目标运动轮运动的电机的转速设置为预设转速。
27、可选地,所述预设出界允许里程的计算公式为:
28、
29、其中,sd为预设出界允许里程,sl为理论上最小速度时的最大出界里程,v0为机器人到边的初始速度,a为机器人的减速度。
30、一种机器人防跌落控制装置,包括:
31、信息获取模块,用于获取设置在机器人的指定区域处的多个传感器的位置检测信息;所述指定区域中,同一区域处的多个传感器的设置位置满足预设位置设置条件;
32、条件判断模块,用于判断所述指定区域处的多个传感器的位置检测信息是否满足预设防跌落控制条件;
33、里程计算模块,用于若是,计算所述机器人的持续累计出界里程;
34、防跌落控制模块,用于基于所述持续累计出界里程与预设出界允许里程的比较结果、以及所述指定区域处的多个传感器实时的位置检测信息,对所述机器人进行防跌落控制操作。
35、一种机器人防跌落控制设备,包括:存储器和处理器;
36、其中,所述存储器用于存储程序;
37、处理器调用程序并用于执行上述的机器人防跌落控制方法。
38、一种机器人防跌落控制系统,包括上述的机器人防跌落控制设备,还包括设置在机器人的指定区域处的多个传感器;
39、所述传感器用于,检测位置检测信息,并发送至所述机器人防跌落控制设备。
40、相较于现有技术,本发明具有以下有益效果:
41、本发明提供了一种机器人防跌落控制方法、装置、设备及系统,获取设置在机器人的指定区域处的多个传感器的位置检测信息,判断所述指定区域处的多个传感器的位置检测信息是否满足预设防跌落控制条件,若是,计算所述机器人的持续累计出界里程,基于所述持续累计出界里程与预设出界允许里程的比较结果、以及所述指定区域处的多个传感器实时的位置检测信息,对所述机器人进行防跌落控制操作,实现了机器人的防跌落功能。另外,本发明中,同一区域处设置多个传感器,且多个传感器的设置位置满足预设位置设置条件,能够在同一区域处,从多个位置点检测机器人是否跌落,提高机器人的防跌落检测精度,对跨越组件间缝隙的工况场景的适应性更高。
技术特征:
1.一种机器人防跌落控制方法,其特征在于,包括:
2.根据权利要求1所述的机器人防跌落控制方法,其特征在于,同一区域处的多个传感器中,目标传感器设置在所述区域中的指定位置处,非目标传感器与所述目标传感器的横向距离小于预设距离,所述非目标传感器的纵向设置位置位于由所述目标传感器的设置位置横向延长线与指定位置横向延长线组成的纵向距离范围内。
3.根据权利要求1所述的机器人防跌落控制方法,其特征在于,获取设置在机器人的指定区域处的多个传感器的位置检测信息,包括:
4.根据权利要求1所述的机器人防跌落控制方法,其特征在于,判断所述指定区域处的多个传感器的位置检测信息是否满足预设防跌落控制条件,包括:
5.根据权利要求1所述的机器人防跌落控制方法,其特征在于,计算所述机器人的持续累计出界里程,包括:
6.根据权利要求1所述的机器人防跌落控制方法,其特征在于,基于所述持续累计出界里程与预设出界允许里程的比较结果、以及所述指定区域处的多个传感器实时的位置检测信息,对所述机器人进行防跌落控制操作,包括:
7.根据权利要求6所述的机器人防跌落控制方法,其特征在于,调整所述机器人的轮速,包括:
8.根据权利要求1所述的机器人防跌落控制方法,其特征在于,所述预设出界允许里程的计算公式为:
9.一种机器人防跌落控制装置,其特征在于,包括:
10.一种机器人防跌落控制设备,其特征在于,包括:存储器和处理器;
11.一种机器人防跌落控制系统,其特征在于,包括如权利要求10所述的机器人防跌落控制设备,还包括设置在机器人的指定区域处的多个传感器;
技术总结
本发明提供了一种机器人防跌落控制方法、装置、设备及系统,获取设置在机器人的指定区域处的多个传感器的位置检测信息,判断所述指定区域处的多个传感器的位置检测信息是否满足预设防跌落控制条件,若是,计算所述机器人的持续累计出界里程,基于所述持续累计出界里程与预设出界允许里程的比较结果、以及所述指定区域处的多个传感器实时的位置检测信息,对所述机器人进行防跌落控制操作,实现了机器人的防跌落功能。另外,本发明中,同一区域处设置多个传感器,且多个传感器的设置位置满足预设位置设置条件,能够在同一区域处,从多个位置点检测机器人是否跌落,提高机器人的防跌落检测精度,对跨越组件间缝隙的工况场景的适应性更高。
技术研发人员:宋晓鹏,阮大海,宋小康
受保护的技术使用者:仁洁智能科技有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!