模块化手指的制作方法
本发明涉及机器人,具体而言,涉及一种模块化手指。
背景技术:
1、现有技术中,机器人的手指通常包括三个指段,且三个指段通过转轴枢转连接,从而实现手指的抓取动作,但是,现有的手指的三个指段耦合运动,无法实现单个指段不动,其他指段灵活运动的目的。
技术实现思路
1、本发明的主要目的在于提供一种模块化手指,以解决现有技术中的机器人的手指无法实现单个指段不动,其他指段灵活运动的问题。
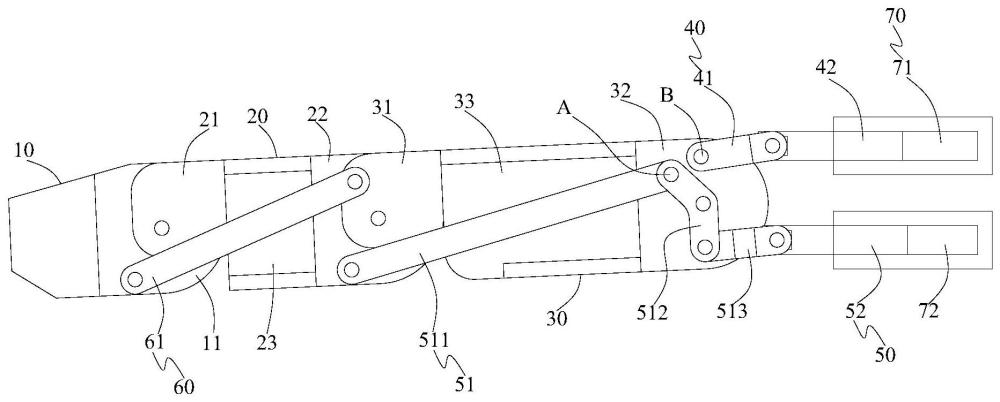
2、为了实现上述目的,本发明提供了一种模块化手指,包括第一指段、第二指段、第三指段、第一驱动机构、第二驱动机构和传动机构,其中,第一指段与第二指段的第一端枢转连接,第二指段的第二端与第三指段的第一端枢转连接;第一驱动机构与第三指段的第二端驱动连接;第二驱动机构与第二指段的第二端驱动连接,且第二驱动机构与第三指段的第二端枢转连接;传动机构的第一端与第一指段枢转连接,传动机构的第二端与第三指段的第一端枢转连接。
3、进一步地,第一驱动机构包括第一连杆和第一驱动部,其中,第一连杆的第一端与第三指段的第二端枢转连接;第一驱动部的驱动端与第一连杆的第二端驱动连接。
4、进一步地,第一驱动部的驱动端与第一连杆的第二端枢转连接。
5、进一步地,模块化手指还包括基座,基座与第三指段的第二端枢转连接,且基座与第三指段的枢转连接处、第二驱动机构与第三指段的枢转连接处位于同一位置处;其中,基座具有第一滑道,第一驱动部滑动设置在第一滑道内。
6、进一步地,第二驱动机构包括连杆机构和第二驱动部,其中,连杆机构的第一端与第二指段的第二端枢转连接;第二驱动部的驱动端与连杆机构的第二端驱动连接。
7、进一步地,第二驱动部的驱动端与连杆机构的第二端枢转连接。
8、进一步地,连杆机构包括第二连杆、第三连杆和第四连杆,第二连杆的第一端与第二指段的第二端枢转连接;第三连杆的第一端与第二连杆的第二端枢转连接;第四连杆的第一端与第三连杆的第二端连接,第四连杆的第二端与第二驱动部枢转连接;其中,位于第三连杆的第一端和第三连杆的第二端之间的第三连杆的中间部分与第三指段的第二端枢转连接。
9、进一步地,第三连杆呈v型,且第三连杆的尖角处的杆段与第三指段的第二端枢转连接。
10、进一步地,模块化手指还包括基座,基座与第三指段的第二端枢转连接,且基座与第三指段的枢转连接处、第二驱动机构与第三指段的枢转连接处位于同一位置处;其中,基座具有第二滑道,第二驱动部滑动设置在第二滑道内。
11、进一步地,传动机构包括第五连杆,第五连杆的第一端与第一指段枢转连接,第五连杆的第二端与第三指段的第一端枢转连接。
12、应用本发明的技术方案,通过将第一驱动机构与第三指段的第二端驱动连接,第二驱动机构与第二指段的第二端驱动连接,第二驱动机构与第三指段的第二端枢转连接,传动机构的第一端与第一指段枢转连接,传动机构的第二端与第三指段的第一端枢转连接,这样,当第一驱动机构不动,且第二驱动机构动作时,在确保第三指段不动的情况下,可以实现单独控制第二指段和第一指段的弯曲或者伸展,从而确保模块化手指的第三指段不动,同时第二指段和第一指段能够实现弯曲或者伸展的动作,确保手指的运动灵活性。
技术特征:
1.一种模块化手指,其特征在于,包括:
2.根据权利要求1所述的模块化手指,其特征在于,所述第一驱动机构(40)包括:
3.根据权利要求2所述的模块化手指,其特征在于,所述第一驱动部(42)的驱动端与所述第一连杆(41)的第二端枢转连接。
4.根据权利要求2所述的模块化手指,其特征在于,所述模块化手指还包括:
5.根据权利要求1所述的模块化手指,其特征在于,所述第二驱动机构(50)包括:
6.根据权利要求5所述的模块化手指,其特征在于,所述第二驱动部(52)的驱动端与所述连杆机构(51)的第二端枢转连接。
7.根据权利要求5所述的模块化手指,其特征在于,所述连杆机构(51)包括:
8.根据权利要求7所述的模块化手指,其特征在于,所述第三连杆(512)呈v型,且所述第三连杆(512)的尖角处的杆段与所述第三指段(30)的第二端枢转连接。
9.根据权利要求5所述的模块化手指,其特征在于,所述模块化手指还包括:
10.根据权利要求9所述的模块化手指,其特征在于,所述传动机构(60)包括:
技术总结
本发明提供了一种模块化手指,包括第一指段、第二指段、第三指段、第一驱动机构、第二驱动机构和传动机构,其中,第一指段与第二指段的第一端枢转连接,第二指段的第二端与第三指段的第一端枢转连接;第一驱动机构与第三指段的第二端驱动连接;第二驱动机构与第二指段的第二端驱动连接,且第二驱动机构与第三指段的第二端枢转连接;传动机构的第一端与第一指段枢转连接,传动机构的第二端与第三指段的第一端枢转连接。本发明解决了现有技术中的机器人的手指无法实现单个指段不动,其他指段灵活运动的问题。
技术研发人员:李明洋,李顺冲,许雄
受保护的技术使用者:节卡机器人股份有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!