一种料箱库桁架机器人手爪的制作方法
本发明涉及一种桁架机器人,具体涉及一种料箱库桁架机器人手爪,属于桁架机器人。
背景技术:
1、桁架机器人一般指直角坐标机器人,是指能够实现自动控制的、可重复编程的、多自由度的、运动自由度建成空间直角关系的、多用途的操作机。直角坐标机器可以被应用于点胶、滴塑、喷涂、码垛、分拣、包装、焊接、金属加工、搬运、上下料、装配、印刷等常见的工业生产领域,在替代人工,提高生产效率,稳定产品质量等方面都具备显著的应用价值。在对金属部件进行车削加工的过程中,需要使用到相应的桁架机器人带动机械手爪抓取金属部件,带动金属部件自动的进入对应的加工设备内进行车削加工处理。
2、现有技术中的桁架机器人手爪在使用过程中,大多数部件均是裸露安装在桁架机器人的机械臂上,由于桁架机器人需要频繁移动和转动,导致桁架机器人的连接部件容易受外力等作用影响出现老化、破损、脱落等情况,当连接部件出现老化、破损、脱落的情况时,机械手爪在带动金属部件移动的过程中容易出现故障,使得机械手爪抓取的金属部件向下掉落的几率提高,降低了析架机器人使用的安全性和稳定性。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出一种料箱库桁架机器人手爪。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种料箱库桁架机器人手爪,包括桁架,所述桁架本体的顶部安装有移动座,移动座的底端安装有固定座,固定座的倾斜面通过第一转轴转动安装有安装块,安装块的两侧外壁均转动安装有转动座,两个转动座远离安装座的一端均安装有手爪本体,其中一个手爪本体的内部抓取有工件,安装座靠近两个转动座的两侧外壁均安装有固定板,两个固定板的两端均设置有用于对工件辅助固定的辅助夹持机构,两个固定板靠近两个转动座的一侧外壁均安装有用于对碎屑进行隔档的遮挡机构。
4、可选的,所述辅助夹持机构包括在固定板两端开设的第一滑槽,两个第一滑槽的内部均安装有双头螺杆,两个双头螺杆的外壁均安装有两个第一滑块。
5、可选的,两个所述第一滑块远离第一滑槽的一端均安装有安装座,两个安装座的内部均安装有转动杆,两个转动杆相靠近的一侧外壁均开设有凹槽,两个凹槽的内部均安装有驱动丝杆,两个驱动丝杆的外壁均安装有移动块。
6、可选的,两个所述移动块远离驱动丝杆的一端均通过两个第一螺栓螺纹安装有固定杆,两个固定杆相靠近的一侧外壁均开设有第二滑槽,两个第二滑槽的内部安装有第二滑块。
7、可选的,两个所述第二滑块远离第二滑槽的一端均通过第二转轴转动安装有第一夹块,第一夹块靠近工件的一侧外壁安装有弧形板,弧形板的内壁与工件的外壁相贴合。
8、可选的,所述第一夹块远离工件的一侧外壁开设有多个排风口,弧形板靠近手爪本体的一侧外壁安装有多个喷头。
9、可选的,所述第一夹块远离手爪本体的一侧外壁转动安装有第二夹块,第二夹块的内壁与工件端部的外壁相贴合,第二夹块远离第一夹块的一侧外壁安装有可以多个排风口进行封堵的盖板。
10、可选的,所述遮挡机构包括安装在固定板靠近转动座一侧外壁的折叠帘,折叠帘位于手爪本体的下方,折叠帘远离固定板的一端安装有连接板。
11、可选的,其中两个所述转动杆远离手爪本体的一侧外壁均安装有矩形条板,两个矩形条板相靠近的一侧外壁均开设有第三滑槽,两个第三滑槽之间共同滑动安装有移动板,移动板与连接板之间通过第二螺栓螺纹连接。
12、可选的,所述安装块靠近两个固定板的两侧外壁均开设有连接孔,连接孔与第二螺栓螺纹适配。
13、本发明的有益效果是:
14、1、该发明中,在手爪本体对工件的一端进行夹持固定后,控制两组转动杆均朝着相靠近方向转动复位,顺势带动两个第一夹块朝着相靠近方向转动,使得两个第一夹块带动两个弧形板与工件的另一端外壁紧密抵接,从而能够对工件的另一端辅助夹持固定,降低工件在输送过程中向下掉落的几率,确保手爪本体夹持工件输送过程中的稳定性和安全性。
15、2、该发明中,在手爪本体对工件的一端进行夹持固定后,两个弧形块与工件的外壁相抵接,控制转动座带动手爪本体和工件一同转动,使得工件远离手爪本体一端表面的杂质在与两个弧形板内壁转动摩擦的过程中得到去除,使得后续加工设备内部的固定机构能够快速稳定的对工件远离手爪本体的一端进行固定,也能够间接的提高工件加工过程中的安全性和效率;位于工件下方的遮挡机构,能够对工件表面去除的杂质进行收集,避免直接向下掉落至其他加工设备内部,对其他加工设备使用带来影响。
16、3、该发明中,在加工设备对工件加工完成后,控制两个第一夹块在两个第二滑块之间进行转动,带动多个排风口转动至远离手爪本体的位置,此时多个排风口向外排出的风力能够顺势将工件表面附着的切削液和碎屑吹落,并在手爪本体将工件从加工设备内向上取出后,控制两个第一夹块继续进行转动,带动多个排风口转动至靠近手爪本体等部件的方向,使得排出的风力能够将手爪本体表面附着的少量切削液和碎屑进行清理,避免工件和手爪本体等部件表面附着的切削液和碎屑对其他加工设备的使用造成影响的问题出现。
17、4、该发明中,加工后的工件如不需要立即进行后续的加工操作,可在手爪本体将其从加工设备内取出,并对其表面进行清理后,控制多个喷头将外部排液机构内预先装填的防锈剂喷射在工件的表面,并通过多个移动块带动两个相对接的第一夹块正在工件表面来回移动,将工件表面的防锈剂涂抹均匀,从而能够避免后续工件在储存的过程中存在锈蚀现象,利于工件更好的进行储存。
技术特征:
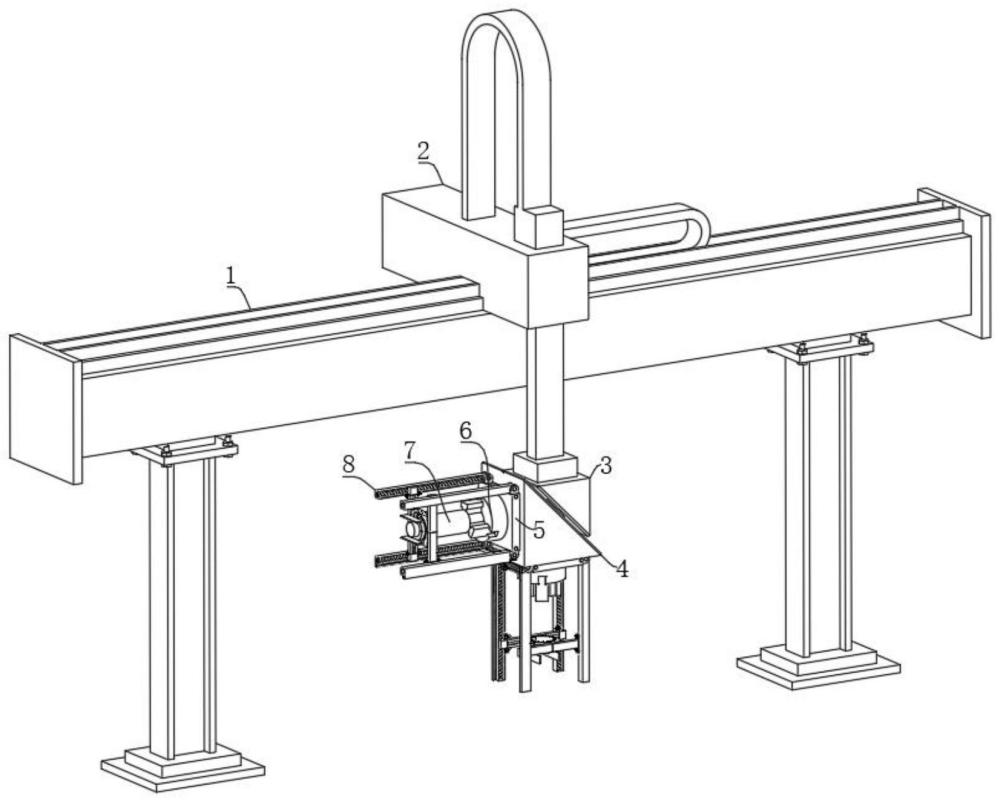
1.一种料箱库桁架机器人手爪,包括桁架,其特征在于,所述桁架本体(1)的顶部安装有移动座(2),移动座(2)的底端安装有固定座(3),固定座(3)的倾斜面通过第一转轴转动安装有安装块(4),安装块(4)的两侧外壁均转动安装有转动座(6),两个转动座(6)远离安装座(21)的一端均安装有手爪本体(9),其中一个手爪本体(9)的内部抓取有工件(7),安装座(21)靠近两个转动座(6)的两侧外壁均安装有固定板(5),两个固定板(5)的两端均设置有用于对工件(7)辅助固定的辅助夹持机构,两个固定板(5)靠近两个转动座(6)的一侧外壁均安装有用于对碎屑进行隔档的遮挡机构。
2.根据权利要求1所述的一种料箱库桁架机器人手爪,其特征在于,所述辅助夹持机构包括在固定板(5)两端开设的第一滑槽(18),两个第一滑槽(18)的内部均安装有双头螺杆(20),两个双头螺杆(20)的外壁均安装有两个第一滑块(19)。
3.根据权利要求2所述的一种料箱库桁架机器人手爪,其特征在于,两个所述第一滑块(19)远离第一滑槽(18)的一端均安装有安装座(21),两个安装座(21)的内部均安装有转动杆(8),两个转动杆(8)相靠近的一侧外壁均开设有凹槽(14),两个凹槽(14)的内部均安装有驱动丝杆(15),两个驱动丝杆(15)的外壁均安装有移动块(16)。
4.根据权利要求3所述的一种料箱库桁架机器人手爪,其特征在于,两个所述移动块(16)远离驱动丝杆(15)的一端均通过两个第一螺栓(17)螺纹安装有固定杆(11),两个固定杆(11)相靠近的一侧外壁均开设有第二滑槽(24),两个第二滑槽(24)的内部安装有第二滑块(25)。
5.根据权利要求4所述的一种料箱库桁架机器人手爪,其特征在于,两个所述第二滑块(25)远离第二滑槽(24)的一端均通过第二转轴转动安装有第一夹块(12),第一夹块(12)靠近工件(7)的一侧外壁安装有弧形板,弧形板的内壁与工件(7)的外壁相贴合。
6.根据权利要求5所述的一种料箱库桁架机器人手爪,其特征在于,所述第一夹块(12)远离工件(7)的一侧外壁开设有多个排风口(26),弧形板靠近手爪本体(9)的一侧外壁安装有多个喷头(28)。
7.根据权利要求6所述的一种料箱库桁架机器人手爪,其特征在于,所述第一夹块(12)远离手爪本体(9)的一侧外壁转动安装有第二夹块(13),第二夹块(13)的内壁与工件(7)端部的外壁相贴合,第二夹块(13)远离第一夹块(12)的一侧外壁安装有可以多个排风口(26)进行封堵的盖板(27)。
8.根据权利要求1所述的一种料箱库桁架机器人手爪,其特征在于,所述遮挡机构包括安装在固定板(5)靠近转动座(6)一侧外壁的折叠帘(10),折叠帘(10)位于手爪本体(9)的下方,折叠帘(10)远离固定板(5)的一端安装有连接板。
9.根据权利要求3所述的一种料箱库桁架机器人手爪,其特征在于,其中两个所述转动杆(8)远离手爪本体(9)的一侧外壁均安装有矩形条板(22),两个矩形条板(22)相靠近的一侧外壁均开设有第三滑槽(23),两个第三滑槽(23)之间共同滑动安装有移动板(29),移动板(29)与连接板之间通过第二螺栓(30)螺纹连接。
10.根据权利要求1所述的一种料箱库桁架机器人手爪,其特征在于,所述安装块(4)靠近两个固定板(5)的两侧外壁均开设有连接孔,连接孔与第二螺栓(30)螺纹适配。
技术总结
本发明公开了一种料箱库桁架机器人手爪,包括桁架,桁架本体顶部安装有移动座,移动座底端安装有固定座,固定座通过第一转轴安装有安装块,安装块两侧外壁均安装有转动座,两个转动座一端均安装有手爪本体,安装座的两侧外壁均安装有固定板,两个固定板的两端均设置有辅助夹持机构,两个固定板靠近两个转动座的一侧外壁均安装有遮挡机构。该发明中,在手爪本体对工件的一端夹持固定后,控制两组转动杆均朝着相靠近方向带动两个第一夹块朝着相靠近方向转动,使得两个弧形板与工件的另一端外壁紧密抵接,从而能够对工件的另一端辅助夹持固定,降低工件在输送过程中向下掉落的几率,确保手爪本体夹持工件输送过程中的稳定性和安全性。
技术研发人员:张为臣,解建员,张为君
受保护的技术使用者:安徽清智云楚智能装备有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!