一种用于柔性制造系统的组合机械手的制作方法
本发明涉及自动化加工领域,具体涉及一种用于柔性制造系统的组合机械手。
背景技术:
1、柔性制造系统属于机床加工行业逐渐发展出的解决办法,机加工行业加工产品品类较多,批量多少不确定性大,因此会导致生产过程中夹具、刀具更换频繁,工件的加工准备时间长,生产过程总是断断续续,生产旺季的时候机床和人员都很紧缺,生产的淡季会出现产能富余,生产资源很难平衡。因此柔性制造系统的出现一方面是解决人员紧缺的问题,另一方面是通过自动化来提高机床的利用率,从而增加产能。柔性制造系统通常由机床、组合机械手或者六轴机器人、料库组成。由组合机械手或六轴机器人代替人工完成物料的自动上下料动作。
2、在现有技术中,组合机械手为了实现物料的自动取放,通常要与物料一起频繁进出机床加工区域,并且在组合机械手运动的过程中不可避免的将切削液滴落在机械手或者地面上,不但使得现场油污四溅,清理工作较难进行,而且滴落至机械手的切削液会给机械手的传动精度和寿命带来极为恶劣的影响,因此用于柔性制造系统的组合机械手除了在功能上在实现上下料动作的基础上,在切削液防护和空间占用方面仍有提升的空间。
技术实现思路
1、本发明的目的在于提供一种用于柔性制造系统的组合机械手,在占用空间较小的前提下实现机床与料库之间的自动上下料动作,同时具有较高的防护性,有效防止机床切削液对组合机械手传动部件等关键部位带来的污染、运动精度降低、抓取不可靠等不利影响。
2、为达到实现上述目的,本发明采用如下技术方案:
3、一种用于柔性制造系统的组合机械手,包括底座、c轴、z轴、x轴和抓取模块;底座作为组合机械手的基体,通过地脚组件直接放置在地面上,c轴固定安装在底座上,c轴为组合机械手的旋转轴,采用旋转分度台实现其支撑和传动,回转精度高;z轴固定安装在旋转分度台上,通过定位销进行定位,z轴采用框架式立柱结构,采用伺服电机驱动,搭配滚珠丝杠和直线导轨实现组合机械手垂直方向上的直线运动,满足组合机械手在不同高度处取放料的功能要求;x轴通过转接座安装在z轴立柱上,x轴工作时在z轴立柱中间往复运动,x轴安装法兰预留标准接口,抓取模块通过标准接口安装在x轴安装法兰上。
4、进一步的,x轴采用二级伸缩结构,一级结构采用伺服电机、减速机及齿轮齿条驱动,搭配直线导轨;x轴同步带轮和同步带组成同步带组件,二级结构与一级结构通过同步带组件传动,两级结构配合运动,实现组合机械手沿x轴的往复运动。
5、进一步的,底座上设计有排液口,底座上表面呈具有一定倾角的斜面设计,组合机械手搬运已加工工件时带出的少量切削液在运动过程中掉落至底座的上表面,经由底座上设计的排液口排出至废液收集箱。
6、进一步的,x轴上方设计有第二柔性伸缩护罩,抓取模块滴落的切削液沿第二柔性伸缩护罩流至x轴两侧导流钣金,x轴两侧导流钣金为倾斜设计,将废液引流至x轴前侧接水槽中,x轴前侧接水槽下方安装有快插接头,快插接头连接导水管,最终将滴落在x轴处的废液导流至下方底座的上表面。
7、进一步的,抓取模块上设计有传感器,可检测物料有无,抓取模块可以根据抓取物料的结构形式更换安装。
8、一种用于柔性制造系统的组合机械手工作状态,包括如下两种:
9、取放物料时,c轴保持在一定角度不运动,z轴和x轴根据物料位置可联动运动至指定位置配合抓取模块进行物料取放。
10、旋转运动时,x轴为收回状态,以减小组合机械手的回转直径,z轴和c轴可根据最终位置联动运动至指定位置。
11、一种用于柔性制造系统的组合机械手,工作时取放物料动作和旋转运动动作交替往复配合运动。
12、相较于现有技术,本发明具有如下技术效果:
13、(a)本发明x轴与抓取模块通过x轴安装法兰连接,连接方式简单有效,抓取模块可以根据工件结构不同进行切换,x轴为二级伸缩结构,一级结构用齿轮齿条驱动,二级结构用同步带组件驱动,x轴工作时位于z轴立柱中间,z轴立柱位于c轴旋转中心,旋转时有效减少了回转直径;
14、(b)本发明x轴收回时物料位于x轴上方,x轴位于z轴立柱中间,在减小回转直径,节约占地面积的同时,可以通过第二柔性伸缩护罩和x轴两侧导流钣金将滴落的废液引流至x轴前侧接水槽,z轴设计有第一柔性伸缩护罩和z轴丝杠防护钣金,c轴外侧有防护钣金,底座设计有排液口,最终低落至底座上的废液通过排液口排出至废液收集箱,有效避免传动部件和机械手关键部位被废液污染,实现了组合机械手整体防护;
15、(c)本发明方案合理,结构容易实现,能充分发挥回转半径小,抓取行程大的机械手工作优势。
技术特征:
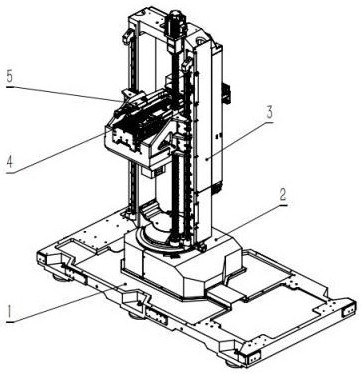
1.一种用于柔性制造系统的组合机械手,其特征在于,具有底座(1)、c轴(2)、z轴(3)、x轴(4)和抓取模块(5);底座(1)作为组合机械手的基体,通过地脚组件直接放置在地面上;c轴(2)固定安装在底座(1)上,c轴(2)为组合机械手的旋转轴,采用旋转分度台(2-1)实现其支撑和传动,回转精度高;z轴(3)固定安装在旋转分度台(2-1)上,通过定位销进行定位,z轴(3)采用框架式立柱结构,采用伺服电机驱动,搭配滚珠丝杠和直线导轨实现组合机械手垂直方向上的直线运动,满足组合机械手在不同高度处取放物料的功能要求;x轴(4)通过转接座(4-1)安装在z轴立柱(3-1)上,x轴(4)工作时在z轴立柱(3-1)中间往复运动,x轴安装法兰(4-3)预留标准接口,抓取模块(5)通过标准接口安装在x轴安装法兰(4-3)上。
2.根据权利要求1所述的一种用于柔性制造系统的组合机械手,其特征在于,所述x轴(4)采用二级伸缩结构,一级结构采用伺服电机、减速机及齿轮齿条驱动,搭配直线导轨,x轴同步带轮(4-8)和同步带(4-9)组成同步带组件,二级结构与一级结构通过同步带组件传动,两级结构配合运动,实现组合机械手沿x轴的往复运动。
3.根据权利要求1所述的一种用于柔性制造系统的组合机械手,其特征在于,所述底座(1)上设计有排液口,底座(1)上表面呈具有一定倾角的斜面设计,组合机械手搬运已加工工件时带出的少量切削液在运动过程中掉落至底座(1)的上表面,经由底座(1)上设计的排液口排出至废液收集箱。
4.根据权利要求1所述的一种用于柔性制造系统的组合机械手,其特征在于,所述x轴(4)上方设计有第二柔性伸缩护罩(4-2),抓取模块(5)滴落的切削液沿第二柔性伸缩护罩(4-2)流至x轴两侧导流钣金(4-4),x轴两侧导流钣金(4-4)为倾斜设计,将废液引流至x轴前侧接水槽(4-5)中,x轴前侧接水槽(4-5)下方安装有快插接头(4-6),快插接头(4-6)连接导水管,最终将滴落在x轴(4)处的废液导流至下方底座(1)的上表面。
5.根据权利要求1所述的一种用于柔性制造系统的组合机械手,其特征在于,所述抓取模块(5)上设计有传感器(5-1),可检测物料有无,抓取模块(5)可以根据抓取物料的结构形式更换安装。
技术总结
本发明涉及一种用于柔性制造系统的组合机械手,包括底座、C轴、Z轴、X轴和抓取模块,所述C轴固定安装在底座上,所述Z轴固定安装在C轴上,Z轴采用伺服电机驱动,搭配滚珠丝杠和直线导轨实现组合机械手垂直方向上的往复直线运动,所述X轴采用二级伸缩结构,两级结构通过同步带传动实现同步运动,实现组合机械手沿X轴的往复运动,X轴安装法兰预留标准接口,抓取模块安装在X轴安装法兰上,所述底座上表面呈倾斜面设计,组合机械手整体C轴、Z轴和X轴都进行了考虑防护的设计,机械手搬运带出的切削液最终汇合到底座上,经由底座上设计的斜面和排液口排出至底座底部放置的废液收集箱,统一搜集和处理。
技术研发人员:高通,聂作晶,袁治远,兰路平
受保护的技术使用者:西安精雕精密机械工程有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!