一种高精度多自由度调节的承载平台的制作方法
本发明涉及装配生产设备,具体涉及一种高精度多自由度调节的承载平台。
背景技术:
1、在现代工业制造领域,大型圆柱件广泛应用于能源、化工、船舶、航空航天等关键领域,常具备大尺寸、高精度和高质量要求的特点。由于其尺寸庞大、结构复杂,装配过程中的精度控制和操作难度均极高,往往需要多个部门协同作业。
2、目前在装配一些大型圆柱型工件时,一般通过滚轮架配合吊车反复吊装调节,或者设计专用的工装等方法才能满足装配要求。吊运装配时需反复调节滚轮架位置,再配合吊车将工件吊运到指定位置,但吊运过程不够稳定,其操作精度不高,吊运到指定位置后也不能较好的固定,受到外力可能就会发生偏移。并且工件吊运到滚轮架上后,为了确保滚轮架与圆柱件之间的接触紧密和均匀,避免吊装过程中出现晃动或偏移,只能对圆柱件进行轴向转动调节,调节自由度较为单一。而设计专用的工装需要消耗额外的人员、时间和材料,且装卸工装通常较为麻烦,操作难度大,通用性不高,使现有的大型圆柱件在装配时调节精度不高,操作难度大且装配效率不高。
3、由此,针对大型圆柱型工件在装配过程中装配设备精准度不高,需要反复调节,且吊装后不稳定易出现偏移,调节不够灵活的问题,现提供一种高精度多自由度调节的承载平台。
技术实现思路
1、本发明意在提供一种高精度多自由度调节的承载平台,以解决现有技术中在针对大型圆柱型工件在装配时精准度不够,需要反复调节,且吊装后不够稳定,调节不够灵活,导致装配过程费时费力的问题。
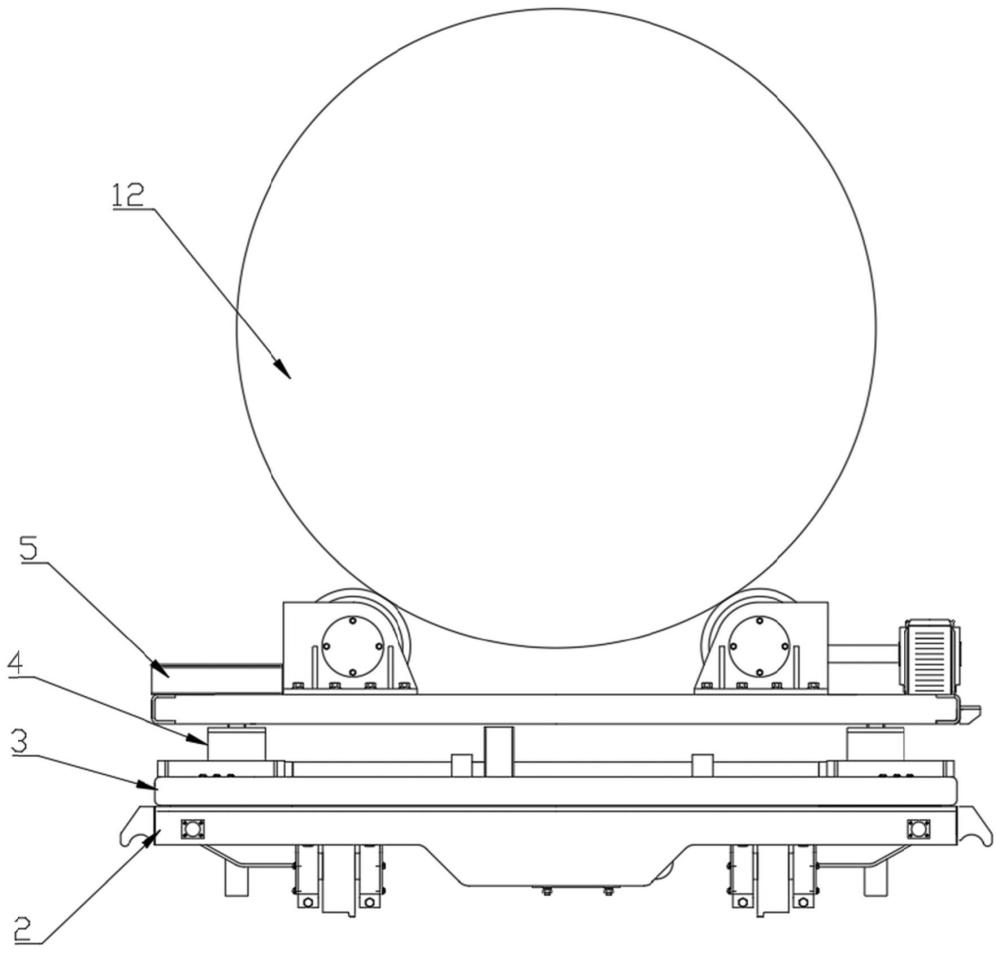
2、为达到上述目的,本发明采用如下技术方案,一种高精度多自由度调节的承载平台,通过横向左右、纵向上下、正反向转动,实现多自由度调节,能够更灵活调节工件,满足大部分工件装配需求,提高设备通用型,也提高调节的精准度和稳定性,提高装配效率。具体包括与控制柜电连接的承载平台,所述承载平台包括行走机构,所述行走机构包括底架组成,在底架组成的两端分别设有导轨组件,在导轨组件上设有传感器限位装置,传感器限位装置与控制柜电连接;在所述底架组成上设有横向调节机构,所述传感器限位装置控制所述横向调节机构移动范围;所述横向调节机构包括调节架组成,在调节架组成的两端分别设有滚轮组件,所述滚轮组件分别与所述导轨组件配合,使调节架组成在导轨组件上移动;在所述横向调节机构上设有升降机构,所述升降机构包括两组升降组件,和分别与两组升降组件连接的联动组件;在所述升降机构上设有用于放置工件的滚转机构,所述滚转机构滚转角度为360°,所述滚转机构包括主动轮组件和从动轮组件,所述主动轮组件通过工件带动所述从动轮组件转动。
3、本方案的原理及优点是:
4、大型圆柱件在装配过程中,首要难点在于精度控制,由于尺寸巨大,圆柱件的微小形变、温度变化、材料应力等因素都可能对装配精度产生显著影响。在装配过程中除了需要确保操作的稳定性和安全性,还需要考虑操作人员的舒适度和效率,避免长时间的重体力劳动对操作人员造成安全隐患。
5、为提高装配效率,保证装配稳定性的同时降低操作难度,简化操作过程,保证操作人员的生产安全,本申请采用了多层结构设置调节机构,以行走机构实现整个承载平台的移动,保证平台承载能力,以横向调节机构实现横向位移,通过升降机构实现纵向调节,最后通过滚转机构实现正反转多自由度调节,直接在承载平台上实现多角度的精准调节控制,以此满足大部分装配情境。在装配时,工件只需要吊装至滚转机构上即可,从而简化吊装操作过程,可保证操作人员的操作安全性,也能确保平台整体的稳定性。
技术特征:
1.一种高精度多自由度调节的承载平台,其特征在于:包括与控制柜电连接的承载平台,所述承载平台包括行走机构,所述行走机构包括底架组成,在底架组成的两端分别设有导轨组件,在导轨组件上设有传感器限位装置,传感器限位装置与控制柜电连接;在所述底架组成上设有横向调节机构,所述传感器限位装置控制所述横向调节机构移动范围;所述横向调节机构包括调节架组成,在调节架组成的两端分别设有滚轮组件,所述滚轮组件分别与所述导轨组件配合,使调节架组成在导轨组件上移动;在所述横向调节机构上设有升降机构,所述升降机构包括两组升降组件,和分别与两组升降组件连接的联动组件;在所述升降机构上设有用于放置工件的滚转机构,所述滚转机构滚转角度为360°,所述滚转机构包括主动轮组件和从动轮组件,所述主动轮组件通过工件带动所述从动轮组件转动。
2.根据权利要求1所述的一种高精度多自由度调节的承载平台,其特征在于:所述导轨组件包括两组平面导轨和两组v型导轨,所述平面导轨与所述v型导轨相对设置,并分别设于所述底架组成的四个角处。
3.根据权利要求2所述的一种高精度多自由度调节的承载平台,其特征在于:所述滚轮组件包括两组平面滚轮和两组v型滚轮,所述平面滚轮活动设于所述平面导轨上,所述v型滚轮活动设于所述v型导轨上。
4.根据权利要求1所述的一种高精度多自由度调节的承载平台,其特征在于:所述升降组件包括与电气控制机构连接的升降机;所述联动组件包括与所述升降机连接的传动轴,在传动轴上设有大小同步轮,大小同步轮与电机连接并带动传动轴转动。
5.根据权利要求1所述的一种高精度多自由度调节的承载平台,其特征在于:所述滚转机构包括滚转架组成,所述滚转架组成设于所述升降机构上;所述主动轮组件设于所述滚转架组成一端,所述从动轮组件设于所述滚转架组成另一端;所述主动轮组件与所述从动轮组件之间的距离为450-1400mm。
6.根据权利要求2所述的一种高精度多自由度调节的承载平台,其特征在于:所述导轨组件包括设于导轨外侧的u型架,所述u型架设于底架组成上;所述传感器限位装置设于所述u型架内侧,监测所述滚轮组件横向移动距离。
7.根据权利要求3所述的一种高精度多自由度调节的承载平台,其特征在于:所述平面滚轮为两组水平设置的滚轮,每组包括两个相对设置的平面滚轮;所述v型滚轮为两组相对倾斜设置成v型结构的滚轮,每组包括两个相对倾斜设置的倾斜滚轮。
8.根据权利要求1所述的一种高精度多自由度调节的承载平台,其特征在于:所述主动轮组件包括两个并排设置的主动轮,两个主动轮之间通过第一联轴器连接;所述从动轮组件包括两个并排设置的从动轮,两个从动轮与两个主动轮相对设置,两个从动轮之间通过第二联轴器连接。
9.根据权利要求1所述的一种高精度多自由度调节的承载平台,其特征在于:所述升降机构上还设有纵向限位组件,控制升降机构的升降行程范围。
10.根据权利要求1所述的一种高精度多自由度调节的承载平台,其特征在于:在所述底架组成的下方还设有车轮组成。
技术总结
本发明涉及装配生产设备技术领域,公开了一种高精度多自由度调节的承载平台,包括行走机构,行走机构包括底架组成,在底架组成的两端设有导轨组件;在底架组成上设有横向调节机构,横向调节机构包括调节架组成,在调节架组成的两端设有滚轮组件,滚轮组件分别与导轨组件配合,使调节架组成在导轨组件上移动;在横向调节机构上设有升降机构,升降机构包括两组升降组件;在升降机构上设有用于放置工件的滚转机构,滚转机构包括主动轮组件和从动轮组件,主动轮组件通过工件带动从动轮组件转动。本发明有效提高大型圆柱件在装配过程中装配设备的精准度,减少反复调节过程,操作更简便灵活,保证吊装稳定性,提高装备通用性。
技术研发人员:张辉,陈启明,彭诗琴,刘刚,甘明天,李乔,范成桢,窦加强
受保护的技术使用者:重庆长征重工有限责任公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!