一种能机械防夹的升降式拉手的制作方法
本技术涉及智能拉手,尤其涉及一种能机械防夹的升降式拉手。
背景技术:
1、升降式拉手是一种能自动伸出和隐藏的门拉手。在当前的智能家居市场中,升降式拉手作为一种方便实用的门控设备,已经得到了广泛的应用。升降式拉手的核心优势在于其能够提供比传统静态拉手更为便捷和安全的使用体验。通过自动伸出和隐藏的机制,升降式拉手不仅能够减少门拉手占用空间,增加美观性,还能在一定程度上减少细菌和病毒通过接触传播的风险。
2、传统的升降式拉手设计普遍采用电机作为动力源,借助电机的转动驱动机械结构实现拉手的伸缩运动。这种设计思路使得升降式拉手能够实现自动化控制,用户仅需通过简单的触控或远程控制即可操纵拉手的伸缩,极大地提升了使用便利性。然而,在实际使用过程中,这种直接由电机驱动的升降式拉手也暴露出了一系列安全性问题。其中,最为突出的就是所谓的“夹手问题”。该问题主要是由于在电机驱动拉手回缩时,如果用户的手仍旧握在拉手上,电机的力量可能会导致用户手部被夹伤,这不仅会造成使用者的身体伤害,也严重影响了产品的安全性与可靠性。
3、此外,电机直驱的设计还可能存在动力不足或过载保护不足的问题。在一些极端情况下,如果拉手遇到较大的外力阻碍其正常回缩,电机可能会因为过载而损坏,或者在力量不足以克服外力的情况下无法正常工作,这些都会对用户体验和产品寿命产生不良影响。
4、因此,有必要对现有技术进行进一步改进和完善,以克服这些不足之处,本实用新型就是基于这种情况做出的。
技术实现思路
1、本实用新型目的是克服现有技术的不足,提供一种更加安全可靠的能机械防夹的升降式拉手。
2、本实用新型是通过以下技术方案实现的:
3、为解决上述技术问题,本实用新型提供一种能机械防夹的升降式拉手,包括锁面板,所述锁面板上活动连接有能内外滑动以伸出和缩回锁面板的拉手组件,所述拉手组件和锁面板之间设有能向外顶推拉手组件以使其往外伸出锁面板的顶推头、以及向内弹性顶压拉手组件以使其往内缩回锁面板的弹性复位组件,所述顶推头连接有用于驱动其内外移动的电动驱动组件,所述电动驱动组件驱动顶推头向锁面板内移动时所述拉手组件在弹性复位组件的弹性力作用下缩回锁面板内。
4、为了进一步解决本实用新型所要解决的技术问题,本实用新型提供的一种能机械防夹的升降式拉手中,所述拉手组件包括竖向的拉手主体、以及设在拉手主体下部并用于和锁面板活动连接的连接臂。
5、为了进一步解决本实用新型所要解决的技术问题,本实用新型提供的一种能机械防夹的升降式拉手中,所述电动驱动组件包括能正反转的驱动电机、以及设在所述驱动电机和顶推头之间的传动结构,且所述传动结构将驱动电机输出轴的旋转运动转化为顶推头沿内外方向的直线运动。
6、为了进一步解决本实用新型所要解决的技术问题,本实用新型提供的一种能机械防夹的升降式拉手中,所述传动结构包括转动连接在锁面板上的旋转件、设在顶推头上的齿条部,且所述驱动电机输出轴和旋转件之间设有锥齿轮副,所述旋转件和齿条部之间设有齿轮齿条副。
7、为了进一步解决本实用新型所要解决的技术问题,本实用新型提供的一种能机械防夹的升降式拉手中,所述驱动电机电性连接有用于检测顶推头是否后移到位的第一位置传感器、以及用于检测拉手组件是否后移到位的第二位置传感器。
8、为了进一步解决本实用新型所要解决的技术问题,本实用新型提供的一种能机械防夹的升降式拉手中,所述第一位置传感器和第二位置传感器均为触控开关,当所述顶推头向锁面板内缩回到位时顶触第一位置传感器,所述的拉手组件向锁面板内缩回到位时顶触第二位置传感器;当第一位置传感器和第二位置传感器同时被顶触时驱动电机停止转动,当仅第一位置传感器被顶触时驱动电机反转驱动顶推头向锁面板外伸出。
9、为了进一步解决本实用新型所要解决的技术问题,本实用新型提供的一种能机械防夹的升降式拉手中,所述弹性复位组件包括固定在锁面板上的导向杆、固定在拉手组件上的限位板、设在限位板上并供导向杆后端穿过的通孔、以及套设在导向杆上并往后顶压限位板的弹性复位件。
10、为了进一步解决本实用新型所要解决的技术问题,本实用新型提供的一种能机械防夹的升降式拉手中,所述拉手组件和顶推头之间设有第一导向结构,所述拉手组件和锁面板之间设有第二导向结构。
11、为了进一步解决本实用新型所要解决的技术问题,本实用新型提供的一种能机械防夹的升降式拉手中,所述第一导向结构包括设在拉手组件上且沿内外方向设置的第一导向槽、以及设在顶推头上且能与第一导向槽相互滑动配合的第一导轨。
12、为了进一步解决本实用新型所要解决的技术问题,本实用新型提供的一种能机械防夹的升降式拉手中,所述第二导向结构包括设置在锁面板上且沿内外方向设置的第二导向槽、以及设在拉手组件上并与第二导向槽相互滑动配合的第二导轨。
13、与现有技术相比,本实用新型有如下优点:
14、1.本实用新型中,当电动驱动组件使顶推头向内移动时,拉手组件并不是由电动驱动组件直接拉回,而是通过安装在其中的弹性复位组件提供弹性力来实现的。这种设计的巧妙之处在于,当拉手组件在回缩过程中遇到如手指等阻碍时,由于是由弹性复位组件提供的弹性力而非电动驱动组件的直接力量推动,因此拉手的回缩力度会因阻碍而自动减弱,大大减少了夹伤的风险。这种机制不仅保护了用户免受伤害,也避免了因为阻力过大而导致的电机过载问题,从而增强了升降式拉手的安全性与耐用性。
15、2.此外,本实用新型采用的弹性复位组件,是一种纯机械式的防夹结构,它通过机械原理实现了自动回弹和复位的功能。这种结构不仅具备安全可靠的优点,而且结构简单,成本低廉,易于实现。
技术特征:
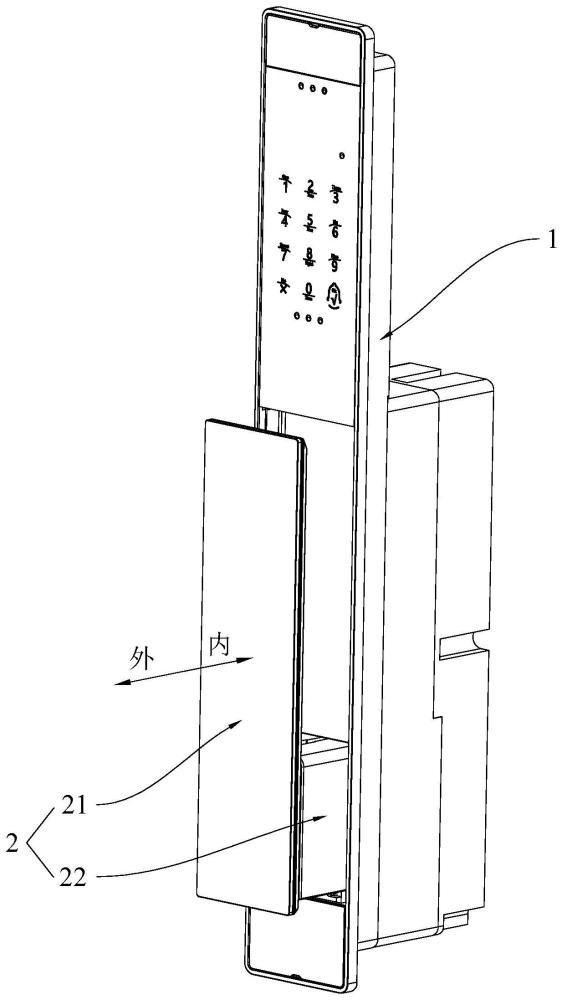
1.一种能机械防夹的升降式拉手,其特征在于:包括锁面板(1),所述锁面板(1)上活动连接有能内外滑动以伸出和缩回锁面板(1)的拉手组件(2),所述拉手组件(2)和锁面板(1)之间设有能向外顶推拉手组件(2)以使其往外伸出锁面板(1)的顶推头(3)、以及向内弹性顶压拉手组件(2)以使其往内缩回锁面板(1)的弹性复位组件(4),所述顶推头(3)连接有用于驱动其内外移动的电动驱动组件(5),所述电动驱动组件(5)驱动顶推头(3)向锁面板(1)内移动时所述拉手组件(2)在弹性复位组件(4)的弹性力作用下缩回锁面板(1)内。
2.根据权利要求1所述的一种能机械防夹的升降式拉手,其特征在于:所述拉手组件(2)包括竖向的拉手主体(21)、以及设在拉手主体(21)下部并用于和锁面板(1)活动连接的连接臂(22)。
3.根据权利要求1或2所述的一种能机械防夹的升降式拉手,其特征在于:所述电动驱动组件(5)包括能正反转的驱动电机(51)、以及设在所述驱动电机(51)和顶推头(3)之间的传动结构,且所述传动结构将驱动电机(51)输出轴的旋转运动转化为顶推头(3)沿内外方向的直线运动。
4.根据权利要求3所述的一种能机械防夹的升降式拉手,其特征在于:所述传动结构包括转动连接在锁面板(1)上的旋转件(52)、设在顶推头(3)上的齿条部(31),且所述驱动电机(51)输出轴和旋转件(52)之间设有锥齿轮副(5a),所述旋转件(52)和齿条部(31)之间设有齿轮齿条副(5b)。
5.根据权利要求3所述的一种能机械防夹的升降式拉手,其特征在于:所述驱动电机(51)电性连接有用于检测顶推头(3)是否后移到位的第一位置传感器(53)、以及用于检测拉手组件(2)是否后移到位的第二位置传感器(54)。
6.根据权利要求5所述的一种能机械防夹的升降式拉手,其特征在于:所述第一位置传感器(53)和第二位置传感器(54)均为触控开关,当所述顶推头(3)向锁面板(1)内缩回到位时顶触第一位置传感器(53),所述的拉手组件(2)向锁面板(1)内缩回到位时顶触第二位置传感器(54);当第一位置传感器(53)和第二位置传感器(54)同时被顶触时驱动电机(51)停止转动,当仅第一位置传感器(53)被顶触时驱动电机(51)反转驱动顶推头(3)向锁面板(1)外伸出。
7.根据权利要求1或2所述的一种能机械防夹的升降式拉手,其特征在于:所述弹性复位组件(4)包括固定在锁面板(1)上的导向杆(41)、固定在拉手组件(2)上的限位板(42)、设在限位板(42)上并供导向杆(41)后端穿过的通孔(421)、以及套设在导向杆(41)上并往后顶压限位板(42)的弹性复位件(43)。
8.根据权利要求1或2所述的一种能机械防夹的升降式拉手,其特征在于:所述拉手组件(2)和顶推头(3)之间设有第一导向结构,所述拉手组件(2)和锁面板(1)之间设有第二导向结构。
9.根据权利要求8所述的一种能机械防夹的升降式拉手,其特征在于:所述第一导向结构包括设在拉手组件(2)上且沿内外方向设置的第一导向槽(23)、以及设在顶推头(3)上且能与第一导向槽(23)相互滑动配合的第一导轨(32)。
10.根据权利要求8所述的一种能机械防夹的升降式拉手,其特征在于:所述第二导向结构包括设置在锁面板(1)上且沿内外方向设置的第二导向槽(11)、以及设在拉手组件(2)上并与第二导向槽(11)相互滑动配合的第二导轨(24)。
技术总结
本技术公开了一种能机械防夹的升降式拉手,包括锁面板,所述锁面板上活动连接有能内外滑动以伸出和缩回锁面板的拉手组件,所述拉手组件和锁面板之间设有能向外顶推拉手组件以使其往外伸出锁面板的顶推头、以及向内弹性顶压拉手组件以使其往内缩回锁面板的弹性复位组件,所述顶推头连接有用于驱动其内外移动的电动驱动组件,所述电动驱动组件驱动顶推头向锁面板内移动时所述拉手组件在弹性复位组件的弹性力作用下缩回锁面板内。本技术具有能机械防夹、更加安全可靠的优点。
技术研发人员:李同,覃庆华,农昌霖,邓永远,冯东平
受保护的技术使用者:狮柯智控科技(深圳)有限公司
技术研发日:20240402
技术公布日:2025/1/16
- 还没有人留言评论。精彩留言会获得点赞!