一种导轨巡检机器人
本发明属于机器人,特别涉及一种导轨巡检机器人。
背景技术:
1、随着电子技术的发展,机器人被越来越广泛地应用于施工、巡检等工作场景。现有技术中的巡检机器人主要有轮式和履带式,然而由于输电线路的部分铺设地点位于地下管廊中,轮式和履带式巡检机器人通常只能在平缓路面行走巡检,即便能够在地下管廊这类空间狭窄且路线曲折的复杂环境下行进,也会由于gps信号较弱等原因产生难以定位的问题。
2、针对上述问题,公开号为cn114083512b的中国发明专利公开了一种导轨巡检机器人,包括:机身主体,所述机身主体上设有主动机构、驱动机构和定位机构;所述主动机构的一端设有第一主动轮和第一压紧轮,所述主动机构的另一端设有第二主动轮,所述第一主动轮和所述第二主动轮分别与所述驱动机构连接,其中,所述第一主动轮和所述第一压紧轮之间形成第一导轨能够横穿的空间,所述第二主动轮用于在第二导轨上滚动行进;所述定位机构包括编码器,所述编码器的第一转轴与所述第一压紧轮的第二转轴固定连接,通过所述第二转轴的转动记录巡检位置。上述专利能够解决现有技术中的巡检机器人难以在地下管廊等复杂环境下工作和准确定位的问题。
3、但是上述技术方案采用编码器采集转动距离进而判断装置的位置,但是在实际使用时,驱动机构的主动轮和导轨之间会发生相对滑动,且这种滑动造成的位置误差随着行进距离的增加而增大,进而造成巡检装置的位置判断失误;且上述技术方案和现有大多数技术方案均采用前后布置的导向机构对巡检装置进行导向,由于前后布置的导向机构为固定安装,而地下管廊环境中有很多直角转弯的场景,且其转弯半径较小,前后固定布置的导向机构难以实现小角度转弯,进而限制其使用场景,因此,本申请提供一种导轨巡检机器人。
技术实现思路
1、本发明提供一种导轨巡检机器人,旨在解决上述背景技术指出的问题。
2、为解决上述技术问题,本发明采用以下技术方案:
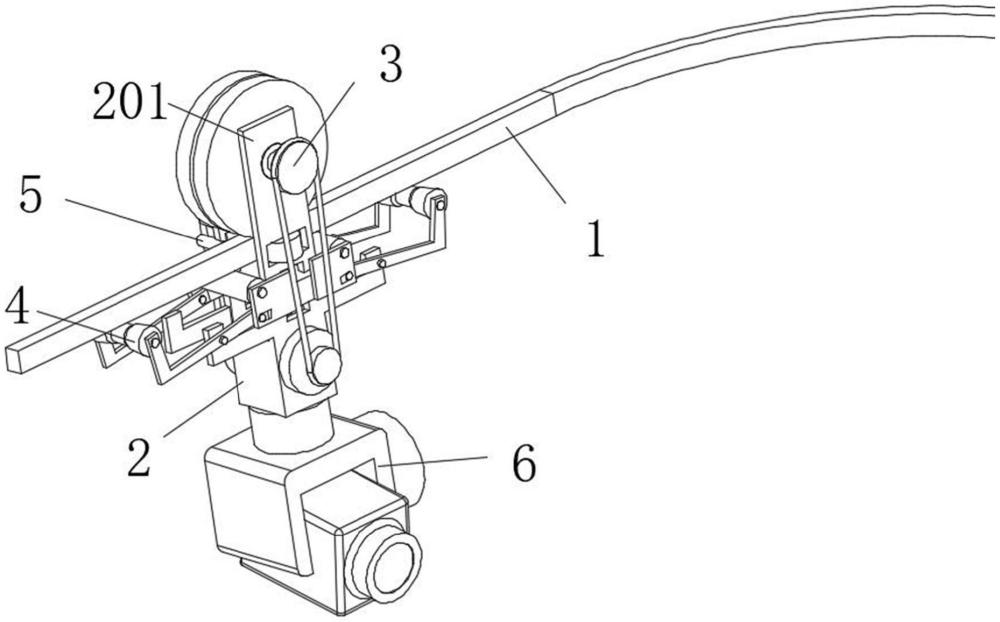
3、一种导轨巡检机器人,包括:导轨,所述导轨的下部设置有安装架,所述安装架的左右侧壁上对称设置有延伸板,所述安装架和延伸板上对称设置有两组驱动组件,所述安装架上部设置有辅助组件,所述辅助组件位于安装架和导轨之间,所述安装架的下部设置有摄像组件;所述导轨上设置有若干感应凸起,所述延伸板上设置有接近位移传感器;
4、所述接近位移传感器用于感应与导轨竖直侧壁之间的距离以及感应所述感应凸起;
5、两组所述驱动组件相互配合用于带动所述安装架沿所述导轨移动以及转向;
6、所述辅助组件用于保持所述安装架的中轴线垂直于所述导轨的上下表面;
7、所述摄像组件用于获取待监测目标的图像信息。
8、进一步的,所述驱动组件包括:与所述安装架固定连接的驱动电机,所述驱动电机的转动轴上固定连接有主动带轮,所述延伸板的上端外侧设置有被动带轮,延伸板的上端内侧设置有驱动轮,所述驱动轮与所述被动带轮之间通过转轴配合,所述转轴与所述延伸板转动连接,所述被动带轮与所述主动带轮之间通过同步带传动配合;
9、所述延伸板的中部转动连接有限制轮,所述限制轮与所述导轨的竖直侧壁配合,所述驱动轮与所述导轨的上侧壁配合。
10、进一步的,所述辅助组件包括:升降架,所述升降架与所述延伸板滑动连接,所述延伸板上开设有与所述升降架配合的升降槽,所述安装架与所述升降架之间设置有伸缩杆,所述伸缩杆的下端与所述安装架固定连接,所述伸缩杆的上端通过第一弹簧与所述升降架配合;
11、所述升降架的上部的前后端分别转动连接有前后倾限制辊,所述升降架的下部的前后端分别转动连接有一对切换杠杆,所述切换杠杆的中部与所述安装架转动连接,每对切换杠杆远离所述升降架的端部之间转动连接有偏转限制辊;
12、所述前后倾限制辊与所述偏转限制辊均与所述导轨的下表面配合。
13、进一步的,所述偏转限制辊的中部设置有配合辊,所述配合辊的两端设置有限制斜面,所述配合辊中部的圆周侧壁的长度与所述导轨的宽度相适配。
14、进一步的,所述切换杠杆用于切换偏转限制辊与导轨的配合状态,使得偏转限制辊与前后倾限制辊不同时与所述导轨配合。
15、进一步的,所述配合辊的两端分别套设有转动套筒,所述转动套筒与所述配合辊滑动连接设置,所述转动套筒的外端固定连接有端盖,所述端盖的外侧与所述切换杠杆转动连接,所述端盖的内侧与所述配合辊之间设置有第二弹簧。
16、进一步的,根据权利要求所述的一种导轨巡检机器人,其特征在于,所述摄像组件包括:与所述安装架下部固定连接的第一转台,所述第一转台的下部固定连接有相机架,所述相机架的内腔转动连接有摄像头,所述相机架的外侧设置有第二转台;
17、所述第一转台用于带动所述相机架转动,所述第二转台用于带动所述摄像头转动。
18、进一步的,所述感应凸起设置在所述导轨的直线段与转角处的相邻端。
19、与现有技术相比,本发明具有以下技术效果:
20、1.本发明所述的一种导轨巡检机器人通过将驱动电机等重部件安装在导轨下方,降低了装置的重心,增加了整体的稳定性,尤其是在不平坦或弯曲的轨道上运行时更为明显;利用感应凸起和接近位移传感器配合,能够强制刷新位移数据,有效避免了由于驱动轮与导轨间滑动导致的位置累积误差问题,提高了定位精度。
21、2.本发明所述的一种导轨巡检机器人通过可调节的前后倾限制辊以及偏转限制辊的设计,使得机器人能够更好地适应地下管廊中可能出现的小半径转弯情况,增强了其在狭窄空间内的灵活性及通行能力;即使其中一个驱动电机发生故障,另一个驱动电机仍可通过偏转限制辊的作用带动整个装置移动,保证了一定程度上的连续工作能力。
22、3.本发明所述的一种导轨巡检机器人通过控制两侧驱动电机的速度来实现对转向角度的精细调控,不仅加快了过弯速度还提升了巡检过程中的操作流畅度;通过辅助组件对装置行进过程中姿态(如前后倾斜)的有效管理,减少了因失控而导致的安全隐患,特别是在处理急转弯时表现尤为突出。
技术特征:
1.一种导轨巡检机器人,其特征在于,包括:导轨(1),所述导轨(1)的下部设置有安装架(2),所述安装架(2)的左右侧壁上对称设置有延伸板(201),所述安装架(2)和延伸板(201)上对称设置有两组驱动组件(3),所述安装架(2)上部设置有辅助组件(4),所述辅助组件(4)位于安装架(2)和导轨(1)之间,所述安装架(2)的下部设置有摄像组件(6);所述导轨(1)上设置有若干感应凸起(7),所述延伸板(201)上设置有接近位移传感器(5);
2.根据权利要求1所述的一种导轨巡检机器人,其特征在于,所述驱动组件(3)包括:与所述安装架(2)固定连接的驱动电机(301),所述驱动电机(301)的转动轴上固定连接有主动带轮(302),所述延伸板(201)的上端外侧设置有被动带轮(304),延伸板(201)的上端内侧设置有驱动轮(305),所述驱动轮(305)与所述被动带轮(304)之间通过转轴配合,所述转轴与所述延伸板(201)转动连接,所述被动带轮(304)与所述主动带轮(302)之间通过同步带(303)传动配合;
3.根据权利要求1所述的一种导轨巡检机器人,其特征在于,所述辅助组件(4)包括:升降架(401),所述升降架(401)与所述延伸板(201)滑动连接,所述延伸板(201)上开设有与所述升降架(401)配合的升降槽(202),所述安装架(2)与所述升降架(401)之间设置有伸缩杆(405),所述伸缩杆(405)的下端与所述安装架(2)固定连接,所述伸缩杆(405)的上端通过第一弹簧(406)与所述升降架(401)配合;
4.根据权利要求3所述的一种导轨巡检机器人,其特征在于,所述偏转限制辊(404)的中部设置有配合辊(4041),所述配合辊(4041)的两端设置有限制斜面,所述配合辊(4041)中部的圆周侧壁的长度与所述导轨(1)的宽度相适配。
5.根据权利要求4所述的一种导轨巡检机器人,其特征在于,所述切换杠杆(403)用于切换偏转限制辊(404)与导轨(1)的配合状态,使得偏转限制辊(404)与前后倾限制辊(402)不同时与所述导轨(1)配合。
6.根据权利要求5所述的一种导轨巡检机器人,其特征在于,所述配合辊(4041)的两端分别套设有转动套筒(4042),所述转动套筒(4042)与所述配合辊(4041)滑动连接设置,所述转动套筒(4042)的外端固定连接有端盖(4043),所述端盖(4043)的外侧与所述切换杠杆(403)转动连接,所述端盖(4043)的内侧与所述配合辊(4041)之间设置有第二弹簧(4044)。
7.根据权利要求1所述的一种导轨巡检机器人,其特征在于,所述摄像组件(6)包括:与所述安装架(2)下部固定连接的第一转台(601),所述第一转台(601)的下部固定连接有相机架(602),所述相机架(602)的内腔转动连接有摄像头(603),所述相机架(602)的外侧设置有第二转台(604);
8.根据权利要求1所述的一种导轨巡检机器人,其特征在于,所述感应凸起(7)设置在所述导轨(1)的直线段与转角处的相邻端。
技术总结
本发明公开了一种导轨巡检机器人,包括:导轨,所述导轨的下部设置有安装架,安装架的左右侧壁上对称设置有延伸板,所述安装架和延伸板上对称设置有两组驱动组件,所述安装架上部设置有辅助组件,所述安装架的下部设置有摄像组件;导轨上设置有若干感应凸起,延伸板上设置有接近位移传感器;所述接近位移传感器用于感应与导轨竖直侧壁之间的距离以及感应所述感应凸起;两组所述驱动组件相互配合用于带动所述安装架沿所述导轨移动以及转向;辅助组件用于保持所述安装架的中轴线垂直于所述导轨的上下表面;利用感应凸起和接近位移传感器配合,能够强制刷新位移数据,有效避免了由于驱动轮与导轨间滑动导致的位置累积误差问题,提高了定位精度。
技术研发人员:黄蔚,刘振龙
受保护的技术使用者:厦门理工学院
技术研发日:
技术公布日:2025/3/24
- 还没有人留言评论。精彩留言会获得点赞!