一种自主通信的消防机器人地面监控系统的制作方法
1.本发明涉及一种自主通信的消防机器人地面监控系统,属于通信技术领域。
背景技术:
2.变压器、换流变等大型充油设备作为我国特高压输电核心构成,是电力传输的重要载体,一旦发生火灾事故,不仅仅会造成变电站电力传输与使用的中断,影响电力供应能力,同时会造成巨大的经济损失。消防机器人可提高消防人员扑救特大恶性火灾的实战能力,减少财产损失和人员伤亡。基于变电站复杂火灾形势,我们需要研发可提升变电站消防能力的新技术、新产品、新方法,研发全场景消防机器人系列产品,提升变电站消防性能提升要求,降低电网安全运行风险。
技术实现要素:
3.本发明所要解决的技术问题是克服现有技术的缺陷,提供一种自主通信的消防机器人地面监控系统,以有效提升消防机器人数据通信、实时监视与控制、作业任务管理、联动作业、远程管控、人机交互和调试维护等技术与功能的智能化与可靠性水平。
4.为解决上述技术问题,本发明提供一种自主通信的消防机器人地面监控系统,包括地面监控系统、rosbridge通信系统和消防机器人系统;所述地面监控系统,用于通过rosbridge通信系统对消防机器人进行连接、启停控制,对消防机器人的工作任务进行控制和对消防机器人的实时状态进行监控;所述消防机器人系统,用于获取消防机器人的实时状态信息、告警信息、子地图信息、实时位置信息、配置信息、视频信息和关节信息,并通过rosbridge通信系统传输给地面监控系统;还用于获取地面监控系统发送的工作任务数据控制消防机器人进行相应的动作;所述rosbridge通信系统采用基于qt的qwebsocket模块开发的利用注册回调的方式进行rosbridge底层通信的通信系统,通信系统通过封装好的rosbridge通信包进行数据传输。
5.进一步的,所述地面监控系统包括机器人控制模块,用于在一个运维班组多台机器人之间进行选择切换,选择一个机器人后切换至对应消防机器人的任务控制模块和实时监控模块的工作界面;所述任务控制模块,用于对对应消防机器人的工作任务进行控制;所述实时监控模块,用于对对应消防机器人的状态进行实时监控。
6.进一步的,所述任务控制模块包括:分析设定模块,用于根据实时状态信息、告警信息、子地图信息、实时位置信息、配置信息、视频信息和关节信息确定告警等级、火灾距离、机器人本体状态信息,根据确定的信息对带电任务进行分析并设定作业任务;编制模块,用于根据分析的结果或设定对任务进行编制;
地图选点模块,用于根据编制好的作业任务在场景地图进行选点,对消防机器人任务执行进行初定位;下发模块,用于将编制后的作业任务和初定位的信息通过rosbridge通信系统下发给消防机器人系统;执行控制模块,用于对下发的作业任务进行暂停、停止或者继续执行控制;展示模块,用于对下发的作业任务进行展示。
7.进一步的,所述实时监控模块包括:视频图像监控模块,用于获取消防机器人的实时视频图像并进行显示;状态及告警信息监控模块,用于根据获取的消防机器人的实时状态和告警信息对消防机器人的状态进行监控;指令遥控模块,用于对机器人进行运动远程控制和消防炮远程控制;子地图交互模块,用于对机器人周边理化环境进行显示及进行人机交互;全局路径规划模块,用于确定目的地点的最优路径。
8.进一步的,所述消防机器人系统包括状态信息模块,用于获取机器人当前的工作模式、监控云台的状态、预警信息。
9.进一步的,所述消防机器人系统包括告警信息模块,用于输出一般告警信息、严重告警信息和危急告警信息;所述一般告警信息包括机器人通讯中断、机器人遇到障碍物,严重告警信息包括磁导航损坏、机器人电池电压过低,危急告警信息包括机器人温度过高、机器人地图位置丢失。
10.进一步的,所述消防机器人系统包括子地图模块,用于构建机器人待命所处区域的地图以及执行任务所处区域的地图。
11.进一步的,所述消防机器人系统包括实时位置信息模块,用于实时标记机器人所处全地图位置、子地图位置以及行进路径的位置;其中全地图是指机器人被设定的可活动的全部区域地图,子地图是指机器人待命区域或任务所处区域的地图。
12.进一步的,所述消防机器人系统包括配置信息模块,用于获取机器人的型号、尺寸、重量、行进速度、负载能力、防水等级、防爆等级、水炮流量、喷射距离。
13.进一步的,所述消防机器人系统包括视频信息模块,用于基于多个高清红外摄像头获取多路视频源,通过rosbridge通信系统发送至地面监控系统。
14.进一步的,所述消防机器人系统包括关节信息模块,用于获取消防机器人的机械臂实时的关节信息、水炮仰射/俯射角度、水平方位角度。
15.本发明所达到的有益效果:通过rosbridge通信系统,实现非ros的系统使用指定数据内容的基于json格式的网络请求来调用ros的功能,包括话题订阅,消息发布,服务调用,参数设置和获取,图片信息的传递,实现地面监控系统和消防机器人的ros的解耦合;有效提升消防机器人数据通信、实时监视与控制、作业任务管理、联动作业、远程管控、人机交互和调试维护等技术与功
能的智能化与可靠性水平。
附图说明
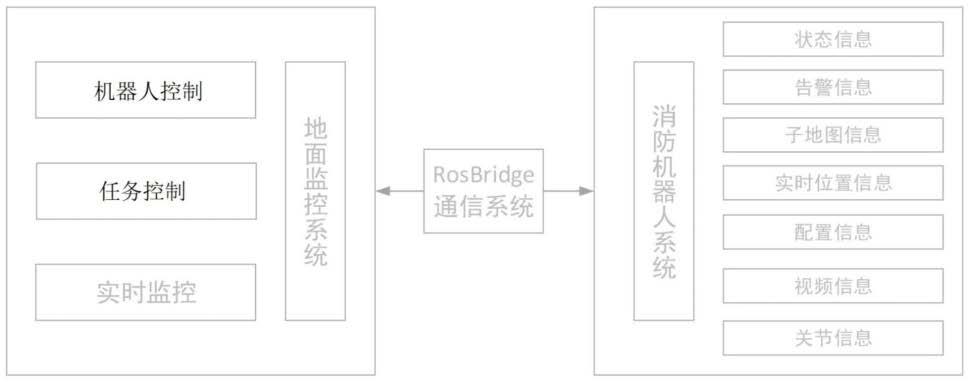
16.图1是本发明一种自主通信的消防机器人地面监控系统的结构图。
具体实施方式
17.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
18.如图1所示,一种自主通信的消防机器人地面监控系统,包括地面监控系统、rosbridge通信系统、消防机器人系统;上述rosbridge通信系统基于qt的websocket模块开发,采用注册回调的方式来实现rosbridge底层通信功能,通过封装好的rosbridge通信包,可以用于订阅消防机器人的状态信息及告警信息、子地图信息、视频配置信息、机器人实时位置信息;同时可以通过远程服务调用,获取子地图的覆盖物、实现对消防机器人及消防炮的控制、以及对消防机器人的作业管理。
19.上述地面监控系统包括机器人控制模块、机器人控制模块、实时监控模块。
20.进一步地,上述机器人控制模块主要为了实现一个运维班组多台机器人之间的选择切换,其子功能包括站内所有机器人,选择一个机器人后其任务管理和实时监控两大模块均切换至对应机器人工作界面。
21.进一步地,上述机器人控制模块主要实现带电作业任务分析、任务编制、作业任务下发、任务执行管理、自定义任务、地图选点及任务展示等功能。
22.进一步地,上述实时监控模块主要实现监视消防机器人作业任务执行的整个过程信息,并对机器人做相应的控制。主要包括视频图像监控、状态及告警信息监控、指令遥控、子地图交互、全局路径规划。
23.上述消防机器人系统由状态信息模块、告警信息模块、子地图模块、实时位置信息模块、配置信息模块、视频信息模块、关节信息模块组成。
24.进一步地,状态信息模块包括机器人当前的工作模式、监控云台的状态、预警信息。
25.进一步地,告警信息模块分为一般告警、严重告警、危机告警,包括机器人内部温度过高、磁导航损坏、遇到障碍物、电池电压过低等。
26.进一步地,子地图模块用于构建机器人待命所处区域的地图以及执行任务所处区域的地图,以便完成路径规划以及导航功能。
27.进一步地,实时位置信息模块用于实时标记机器人所处全地图位置、子地图位置以及行进路径的位置。
28.进一步地,配置信息模块包含机器人的型号、尺寸、重量、行进速度、负载能力、防水等级、防爆等级、水炮流量、喷射距离等。
29.进一步地,视频信息模块基于多个高清红外摄像头形成多路视频源,推送至监控后台进行实时监视分析以及实时操作控制。
30.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人
员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1