一种家用自动灭火机器人
1.本实用新型属于灭火设备技术领域,具体涉及一种家用自动灭火机器人。
背景技术:
2.中国家庭的家具正步入智能化,越来越多的设备被电器替代。从原始的结婚的“老三样”到现在的”新三样”,反映出了人民的日子越来越好,生活质量越来越高。但是在快节奏生活的现在,城市电器的大量投入使用,不仅会让电路承载过大的热量,还会产生漏电、短路等一系列现象。这会引起电火花电弧引起火灾。与其同等重要的是,有人对电器的不正确使用,使其过载或超负荷容易引起电能过量转化多余的热量,如灯管、电动机、电加热器等。
3.在家庭火灾中,由人为原因引起的占绝大部分。人的不安全行为是导致火灾发生的一个最主要因素,如不安全用火、不安全用气,乱扔烟头,在可燃天棚中乱拉电线,乱装灯等。据火灾原因起数统计表明:由人为原因引起的火灾起数每年所占比例在60%左右。
4.还有高层仓库密闭房屋室内、大型商场火灾隐患处,由于监管面积较大,人员有限,并且晚上处于无人值守的状态下,容易引起火灾。
技术实现要素:
5.针对现有技术中家庭中、高层仓库密闭房屋室内、大型商场火灾隐患处,由于监管面积较大,人员有限,并且晚上处于无人值守的状态下,容易引起火灾的问题,提供了一种家用自动灭火机器人。
6.一种家用自动灭火机器人,包括底座、驱动轮、顶盖、中央处理器和灭火装置;
7.所述驱动轮设置于底座上,有动力机构驱动旋转,
8.所述底座上设置框架,所述顶盖可转动的设置于框架上,框架上设置有旋转电机,旋转电机的输出轴连接转臂,转臂的另一端与顶盖连接;
9.所述灭火装置包括第一滑轨、第一滑块、第一驱动齿轮、连杆、灭火框架和灭火器,所述灭火框架可转动的设置于底座上,所述灭火器设置于灭火框架上,
10.所述第一滑轨设置于底座上,所述第一滑块与第一滑轨滑动连接,第一滑块上设置有齿条,所述第一驱动齿轮由设置在底座上马达驱动旋转,所述第一驱动齿轮与第一滑块上的齿条啮合传动,
11.所述连杆一端与灭火框架转动连接,另一端与第一滑块的前端转动连接,
12.所述中央处理器设置于底座上,用于控制整个灭火机器人,
13.所述底座上设置有超声波传感器和视觉传感器。
14.在上述方案的基础上,所述灭火装置还包括升降装置,所述升降装置包括第二滑块、第二滑轨、第二驱动齿轮,
15.所述第二滑轨设置于灭火框架上,
16.所述灭火器设置于第二滑块上,所述第二滑块与第二滑轨滑动连接,所述第二滑
块的一侧设置有齿条,所述第二驱动齿轮由设置于灭火框架上的马达驱动选装,所述第二驱动齿轮与第二滑块的一侧的齿条啮合传动。
17.其中,所述底座上设置有万向轮。
18.其中,所述底座上左右对称的设置两个驱动轮。
19.其中,所述顶盖左右对称的设置两个。
20.本实用新型的有益效果:
21.自动灭火机器人处于全天待机状态,与每个房间的烟雾报警器进行实时数据交换,当室内发生火灾时,烟雾报警器发出警报,机器人获得信息后迅速确定着火房屋位置,超声波及vis 视觉传感器协同配合,扫描周围环境,以快速确定着火点位置,中央处理器计算出喷头灭火所需要的方向和角度,进行自动灭火作业。
附图说明
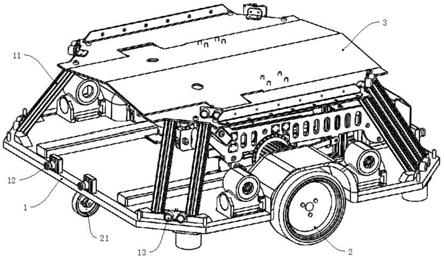
22.图1为本实用新型实施例的立体图;
23.图2为本实用新型实施例的立体图;
24.图3为图1中灭火装置结构原理图;
25.图4为图1中灭火装置的升降机构示意图。
具体实施方式
26.为使本实用新型解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。可以理解的是,此处所描述的具体实施例仅仅用于解释本实用新型,而非对本实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本实用新型相关的部分而非全部。
27.参见图1-图4,本实施例提供一种家用自动灭火机器人,包括底座1、驱动轮2、顶盖3、中央处理器和灭火装置。
28.驱动轮2设置于底座1上,有动力机构驱动旋转,左右对称的设置两套。由中央处理发送指令控制驱动旋转。
29.如图1、2所示,底座1上设置框架11,顶盖3可转动的设置于框架11上,框架11上设置有旋转电机31,旋转电机31的输出轴连接转臂32,转臂32的另一端与顶盖3连接。顶盖3左右对称的设置两个,在旋转电机31的作用下可以打开或者盖合。使得整个灭火机器人的结构更加的紧凑、美观。
30.灭火装置包括第一滑轨41、第一滑块42、第一驱动齿轮43、连杆44、灭火框架45和灭火器46,灭火框架45可转动的设置于底座1上,灭火器46设置于灭火框架45上,第一滑轨41设置于底座1上,第一滑块42与第一滑轨41滑动连接,第一滑块42上设置有齿条,第一驱动齿轮43由设置在底座1上马达驱动旋转,第一驱动齿轮43与第一滑块42上的齿条啮合传动,连杆44一端与灭火框架45转动连接,另一端与第一滑块42的前端转动连接。
31.如图1、3所示,在平常不用的时候,灭火装置收缩到机器人内部,并且盖上顶盖3。当需要灭火的时候,由第一驱动齿轮43带动第一滑块42向右侧滑动,连杆44推动灭火框架4 5旋转,使灭火框架45由水平方向转换为竖直方向,使灭火器46竖直起来,进行灭火。
32.中央处理器设置于底座1上,用于控制整个灭火机器人。中央处理器与每个房间的
烟雾报警器进行实时数据交换,当室内发生火灾时,烟雾报警器发出警报,机器人获得信息后迅速确定着火房屋位置。中央处理其除了控制整个灭火机器人的动作之外,还与超声波传感器 13、视觉传感器12,通过数据分析,获得扫描周围环境,以快速确定着火点位置,中央处理器计算出喷头灭火所需要的方向和角度,进行灭火作业。
33.底座1上设置有超声波传感器13和视觉传感器12。
34.灭火装置还包括升降装置,升降装置包括第二滑块47、第二滑轨49、第二驱动齿轮48,第二滑轨49设置于灭火框架45上,灭火器46设置于第二滑块47上,第二滑块47与第二滑轨49滑动连接,第二滑块47的一侧设置有齿条,第二驱动齿轮48由设置于灭火框架45上的马达驱动选装,第二驱动齿轮48与第二滑块47的一侧的齿条啮合传动。
35.如图4所示,升降装置,在第二驱动齿轮48的作用下,驱动第二滑块47向上滑动,带动灭火器46升高位置。有了这个功能可以更好的选择灭火的高度位置,高效灭火。
36.在本实用新型的描述中,需要说明的是,术语“上”、“下”、“左”、“右”、“顺时针”和“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
37.以上实施方式只是阐述了本实用新型的基本原理和特性,本实用新型不受上述实施方式限制,在不脱离本实用新型精神和范围的前提下,本实用新型还有各种变化和改变,这些变化和改变都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1